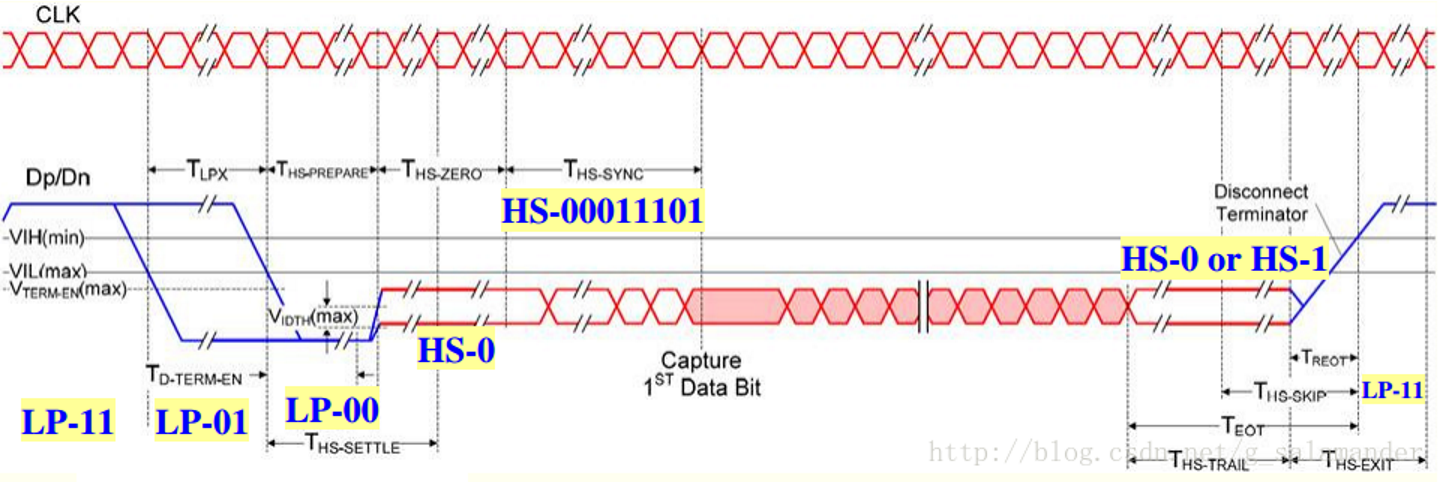
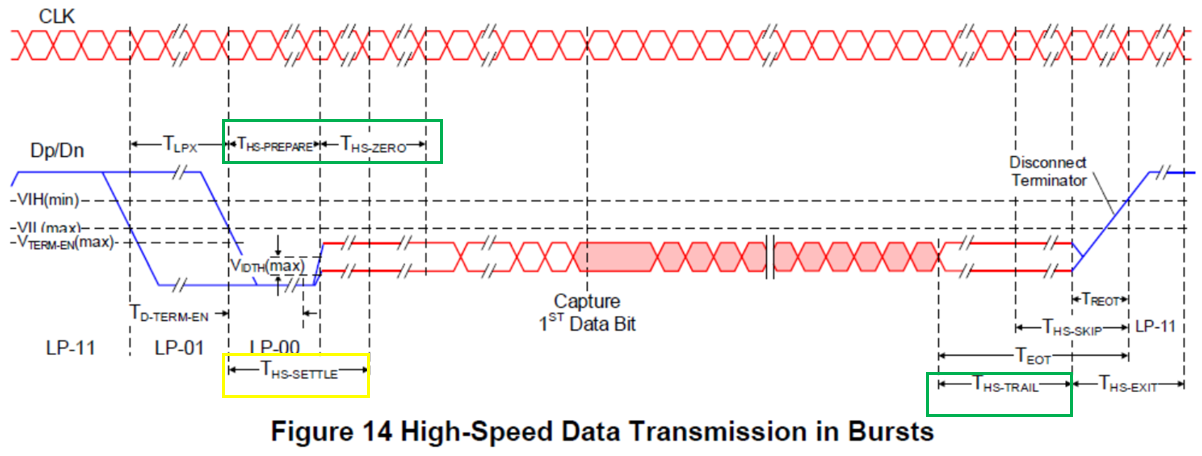
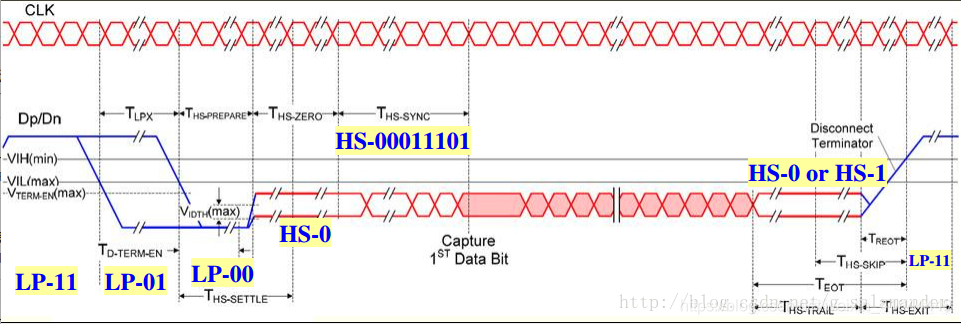
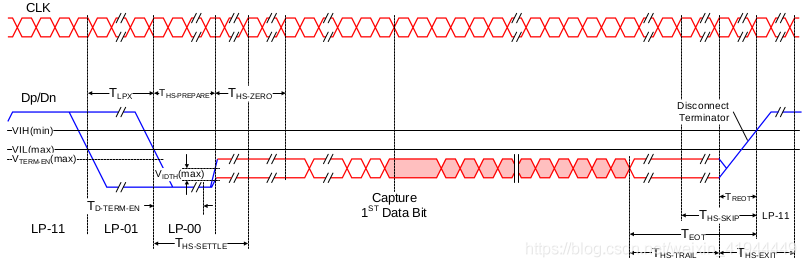
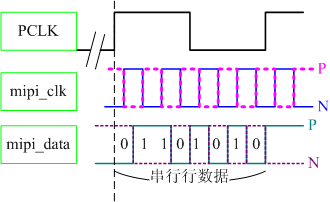
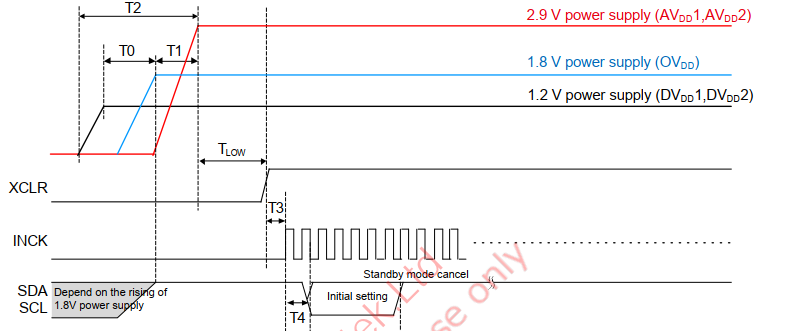
HS-Prepare:表示从low power mode进入到hi speed mode需要prepare一段时间 Hs-zero: 表示从low power mode进入到hi speed mode需要keep LP-00状态一段时间 Hs-trail:表示送完1 st data后需要keep一段时间后才允许进入low power mode,进行下一轮数据传输。
"--------------display-----------------
set nu "行号
syntax on "语法高亮
set ruler "显示当前行和列
set showcmd "显示部分命令
set showmode "最后一行显示当前模式
"set match "显示括号匹配
"--------------display-----------------
"---------------input------------------
set smartindent "自动缩进
set expandtab "将tab转化为空格
set smarttab "插入tab使用shiftwidth
set shiftwidth=4 "缩进列数为4
"---------------input------------------
"---------------search-----------------
set hlsearch "搜索结果高亮显示
"set inccase "预览搜索结果
set ignorecase "不区分大小写
set smartcase "当有大写字母时区分大小写
"---------------search-----------------
"---------------encoding----------------
set encoding=utf-8 "设置编码格式
set fileencodings=utf-8,gb18030,gbk,gb2312,big5
set termencoding=utf-8
"--------------ctags----------------
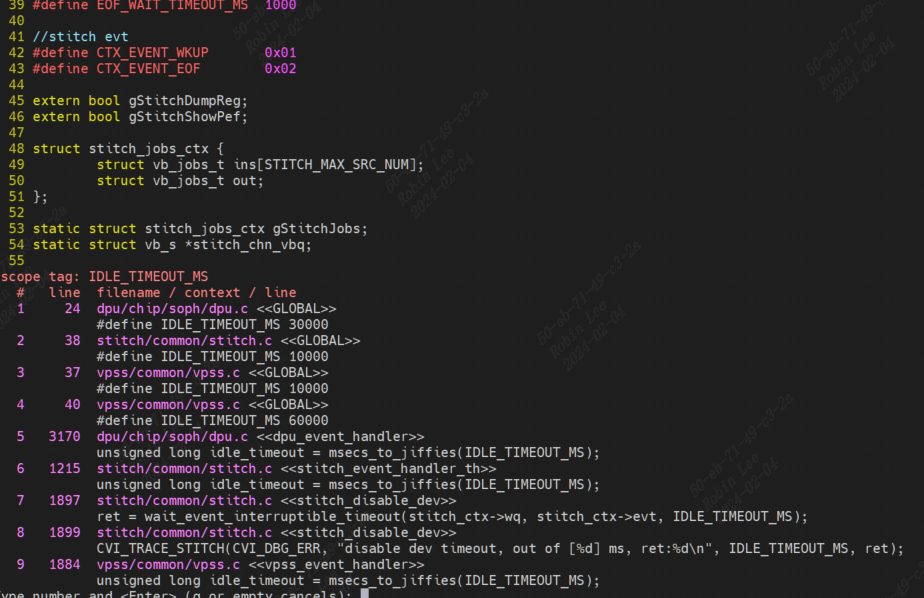
set tags=tags;
set autochdir "通用方式,如果没有找到tags文件,或者没有找到对应的目标,就到父目录中查找,一直向上递归。
"--------------ctags----------------
"--------------taglist----------------
let Tlist_Use_Left_Window=1 "vim左侧窗口显示Taglist
let Tlist_Exit_OnlyWindow=1 "Taglist是最后一个窗口是退出vim
let Tlist_WinWidth=60 "设置Taglist窗口宽度为60
nmap <F2> :Tlist<CR> "设置快捷键<F2>打开Taglist
"--------------taglist----------------
" // The switch of the Source Explorer
nmap <F12> :SrcExplToggle<CR>
" // Set the height of Source Explorer window
let g:SrcExpl_winHeight = 16
" // Set 100 ms for refreshing the Source Explorer
let g:SrcExpl_refreshTime = 500
" // Set "Enter" key to jump into the exact definition context
let g:SrcExpl_jumpKey = "<ENTER>"
" // Set "Space" key for back from the definition context
let g:SrcExpl_gobackKey = "<SPACE>"
" // In order to avoid conflicts, the Source Explorer should know what plugins except
" // itself are using buffers. And you need add their buffer names into below list
" // according to the command ":buffers!"
let g:SrcExpl_pluginList = [
\ "__Tag_List__",
\ "_NERD_tree_",
\ "Source_Explorer"
\ ]
" // The color schemes used by Source Explorer. There are five color schemes
" // supported for now - Red, Cyan, Green, Yellow and Magenta. Source Explorer
" // will pick up one of them randomly when initialization.
let g:SrcExpl_colorSchemeList = [
\ "Red",
\ "Cyan",
\ "Green",
\ "Yellow",
\ "Magenta"
\ ]
" // Enable/Disable the local definition searching, and note that this is not
" // guaranteed to work, the Source Explorer doesn't check the syntax for now.
" // It only searches for a match with the keyword according to command 'gd'
let g:SrcExpl_searchLocalDef = 1
" // Workaround for Vim bug @https://goo.gl/TLPK4K as any plugins using autocmd for
" // BufReadPre might have conflicts with Source Explorer. e.g. YCM, Syntastic etc.
let g:SrcExpl_nestedAutoCmd = 1
" // Do not let the Source Explorer update the tags file when opening
let g:SrcExpl_isUpdateTags = 0
" // Use 'Exuberant Ctags' with '--sort=foldcase -R .' or '-L cscope.files' to
" // create/update the tags file
let g:SrcExpl_updateTagsCmd = "ctags --sort=foldcase -R ."
" // Set "<F12>" key for updating the tags file artificially
let g:SrcExpl_updateTagsKey = "<F12>"
" // Set "<F3>" key for displaying the previous definition in the jump list
let g:SrcExpl_prevDefKey = "<F3>"
" // Set "<F4>" key for displaying the next definition in the jump list
let g:SrcExpl_nextDefKey = "<F4>"
vi /usr/share/vim/vim91/syntax/c.vim
"highlight Functions
syn match cFunctions "\<[a-zA-Z_][a-zA-Z_0-9]*\>[^()]*)("me=e-2
syn match cFunctions "\<[a-zA-Z_][a-zA-Z_0-9]*\>\s*("me=e-1
hi cFunctions gui=NONE cterm=bold ctermfg=40
"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""
" cscope setting
"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""
if has("cscope")
set csprg=/usr/bin/cscope
set csto=1
set cst
set nocsverb
" add any database in current directory
if filereadable("cscope.out")
cs add cscope.out
endif
set csverb
endif
nmap <C-@>s :cs find s <C-R>=expand("<cword>")<CR><CR>
nmap <C-@>g :cs find g <C-R>=expand("<cword>")<CR><CR>
nmap <C-@>c :cs find c <C-R>=expand("<cword>")<CR><CR>
nmap <C-@>t :cs find t <C-R>=expand("<cword>")<CR><CR>
nmap <C-@>e :cs find e <C-R>=expand("<cword>")<CR><CR>
nmap <C-@>f :cs find f <C-R>=expand("<cfile>")<CR><CR>
nmap <C-@>i :cs find i ^<C-R>=expand("<cfile>")<CR>$<CR>
nmap <C-@>d :cs find d <C-R>=expand("<cword>")<CR><CR>
set cscopequickfix=s-,c-,d-,i-,t-,e-
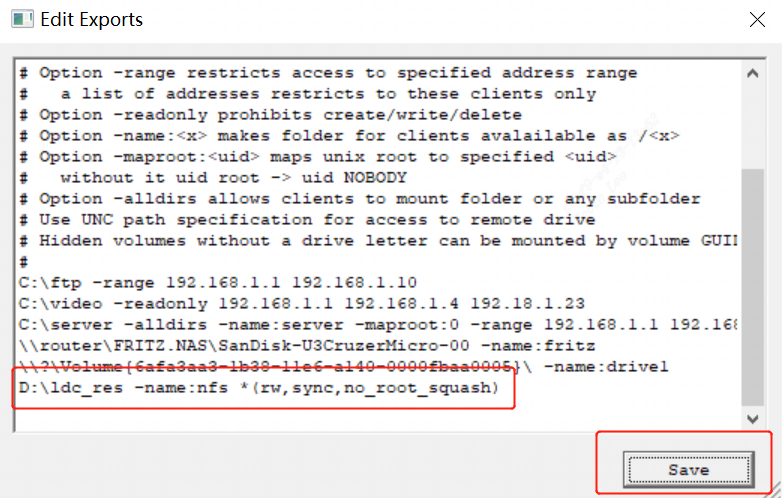
#
# exports example
#
# please read doc for a list of all options
# drive letters should be in upper case, because file-id returns upper case
# by default (option setting) they are mapped to lower case for clients
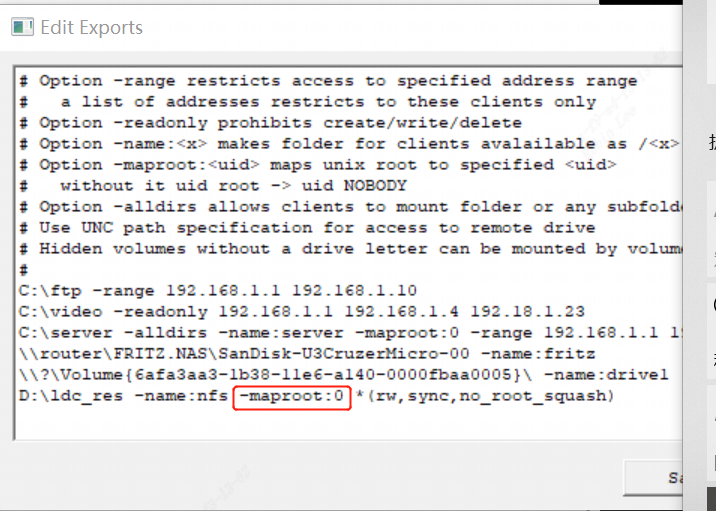
# Option -range restricts access to specified address range
# a list of addresses restricts to these clients only
# Option -readonly prohibits create/write/delete
# Option -name:<x> makes folder for clients avalailable as /<x>
# Option -maproot:<uid> maps unix root to specified <uid>
# without it uid root -> uid NOBODY
# Option -alldirs allows clients to mount folder or any subfolder
# Use UNC path specification for access to remote drive
# Hidden volumes without a drive letter can be mounted by volume GUID
#
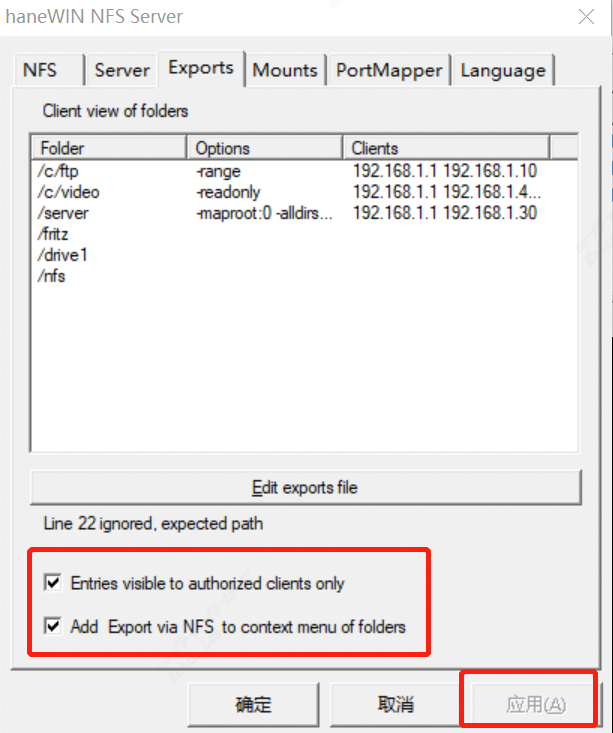
C:\ftp -range 192.168.1.1 192.168.1.10
C:\video -readonly 192.168.1.1 192.168.1.4 192.18.1.23
C:\server -alldirs -name:server -maproot:0 -range 192.168.1.1 192.168.1.30
\\router\FRITZ.NAS\SanDisk-U3CruzerMicro-00 -name:fritz
\\?\Volume{6afa3aa3-1b38-11e6-a140-0000fbaa0005}\ -name:drive1
D:\ldc_res -name:nfs -public -maproot:0 *(rw,sync,no_root_squash)
E:\ -name:nfs_udisk -public -maproot:0 *(rw,sync,no_root_squash)
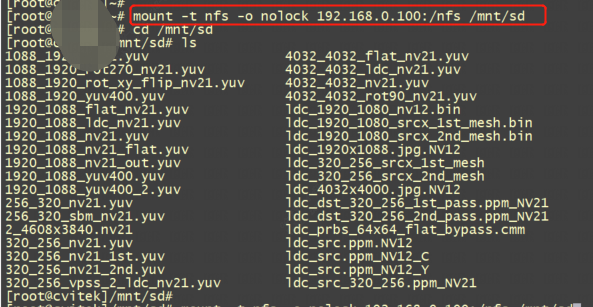
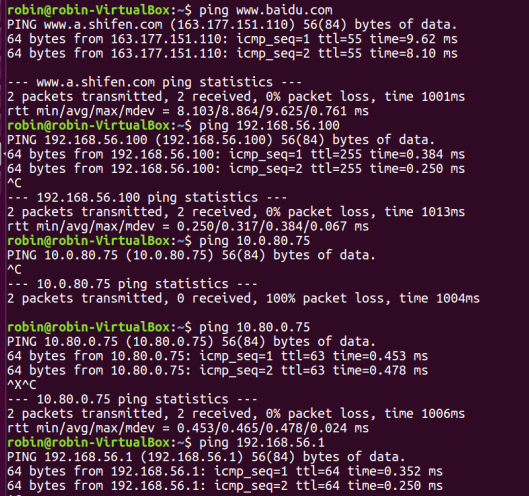
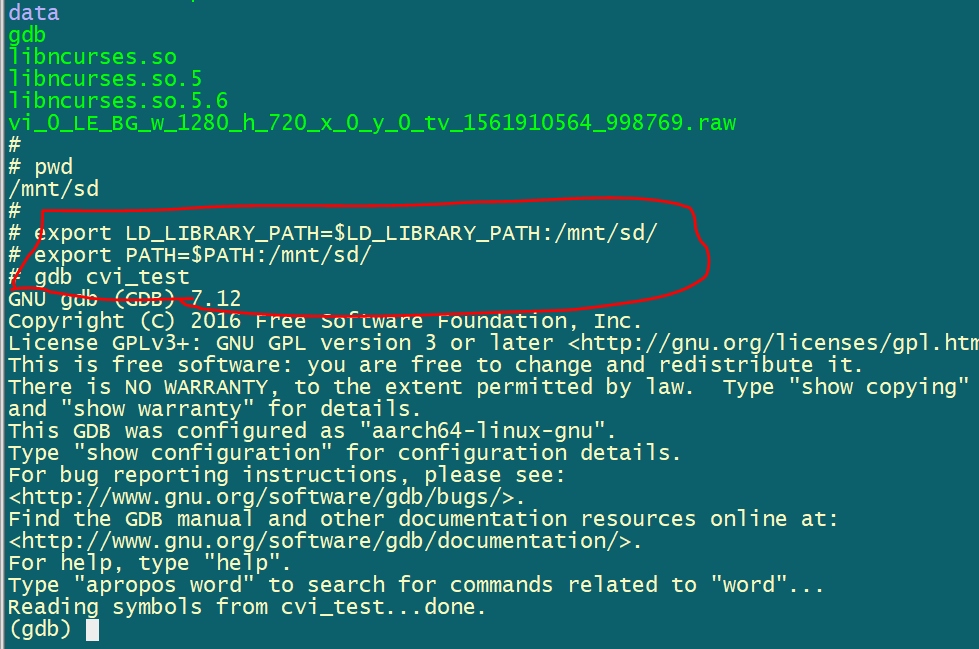
挂载: mount -t nfs -o nolock 192.168.0.100:/nfs_udisk /mnt/
tar xvf gdb-7.12.tar.gz; cd gdb-7.12 ./configure --host=aarch64-linux-gnu-gcc(--host=arm-linux-gnueabihf) --enable-shared --prefix=/home/robin/share/gdb --without-x --disable-gdbtk --disable-tui --without-included-regex --without-included-gettext --disable-werror CFLAGS="-O0 -fPIC" make make install