1 Linux SPI驱动框架
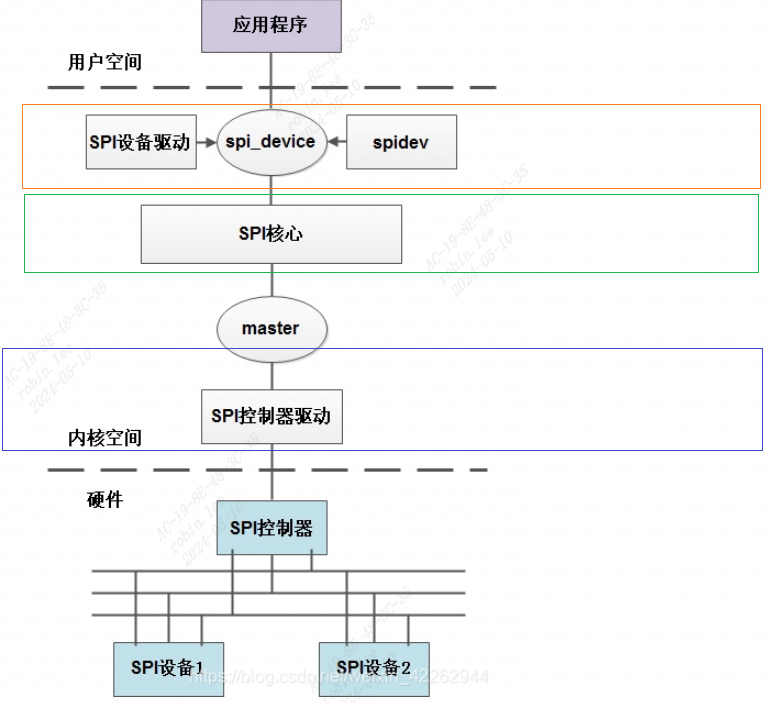
linux SPI驱动框架层次如上图:
除开硬件和用户态应用程序,由上到下分成3层:
1 2 3 设备驱动层: spi框架使用者 核心层:spi框架搭建者 控制器驱动层: spi框架适配者
1.1 spi核心层 SPI核心层代码位于linux_5.10\drivers\spi目录:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 ccflags-$(CONFIG_SPI_DEBUG) := -DDEBUG obj-$(CONFIG_SPI_MASTER) += spi.o obj-$(CONFIG_SPI_MEM) += spi-mem.o obj-$(CONFIG_SPI_MUX) += spi-mux.o obj-$(CONFIG_SPI_SPIDEV) += spidev.o obj-$(CONFIG_SPI_LOOPBACK_TEST) += spi-loopback-test.o obj-$(CONFIG_SPI_ALTERA) += spi-altera.o obj-$(CONFIG_SPI_AR934X) += spi-ar934x.o obj-$(CONFIG_SPI_ARMADA_3700) += spi-armada-3700.o obj-$(CONFIG_SPI_ATMEL) += spi-atmel.o obj-$(CONFIG_SPI_ATMEL_QUADSPI) += atmel-quadspi.o obj-$(CONFIG_SPI_AT91_USART) += spi-at91-usart.o obj-$(CONFIG_SPI_ATH79) += spi-ath79.o obj-$(CONFIG_SPI_AU1550) += spi-au1550.o obj-$(CONFIG_SPI_AXI_SPI_ENGINE) += spi-axi-spi-engine.o obj-$(CONFIG_SPI_BCM2835) += spi-bcm2835.o
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 drivers/spi/spi.c spi-mem.c spi-mux.c include/linux/spi/spi.h spi.c: 一方面对SPI子系统进行初始化工作,注册spi bus,注册spi_master class , 同时提供spi 设备驱动对spi 总线进行操作的API 。 另一方面SPI 子系统对spi 控制器层,提供注册控制器的api 和回调操作函数。 spi .h 包含了spi 核心层的一些重要数据结构,struct spi_master ; struct spi_transfer ;struct spi_message ,以及一些实现比较简单的函数等。 spi -gpio .c :SPI GPIO 框架:SPI 子系统提供了一个名为spi -gpio 的框架, 可使用GPIO 引脚模拟SPI 总线,gpio 模拟spi 代码在drivers /spi /spi -gpio .c 中。 这个框架允许将GPIO 引脚配置为SPI 总线的时钟、片选、输入和输出信号, 并提供了对应的接口函数供驱动程序使用。 spi -bitbang :spi -bitbang 是Linux 内核中提供的一个通用框架,用于在没有硬件SPI 控制器 或需要灵活控制SPI 时序和配置的系统中模拟SPI 总线的通信。代码在spi -bitbang .c 中
核心层的作用:
对上层的使用者,也就是SPI设备驱动:提供标准的spi收发API,以及设备注册函数。
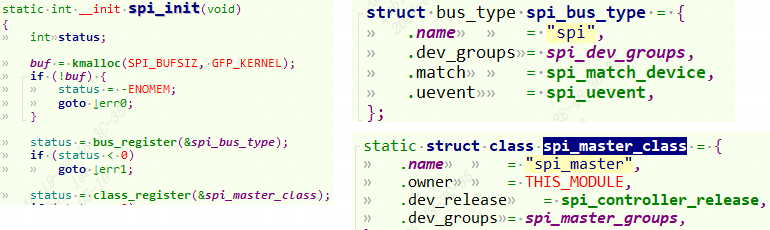
1.1.1 核心层初始化 1.1.1.1 spi_init 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 static int __init spi_init (void ) { int status; buf = kmalloc(SPI_BUFSIZ, GFP_KERNEL); if (!buf) { status = -ENOMEM; goto err0; } status = bus_register(&spi_bus_type); if (status < 0 ) goto err1; status = class_register(&spi_master_class); if (status < 0 ) goto err2; if (IS_ENABLED(CONFIG_SPI_SLAVE)) { status = class_register(&spi_slave_class); if (status < 0 ) goto err3; } if (IS_ENABLED(CONFIG_OF_DYNAMIC)) WARN_ON(of_reconfig_notifier_register(&spi_of_notifier)); if (IS_ENABLED(CONFIG_ACPI)) WARN_ON(acpi_reconfig_notifier_register(&spi_acpi_notifier)); return 0 ; err3: class_unregister(&spi_master_class); err2: bus_unregister(&spi_bus_type); err1: kfree(buf); buf = NULL ; err0: return status; }
spi子系统初始化函数,仅仅是注册了spi bus,以及spi_master class。
成功注册后,在/sys/bus 下即可找到spi 文件目录,在/sys/class下可以看到spi_master目录:
1.1.1.2 spi从设备和驱动的匹配 当spi总线和类注册后,当有驱动和设备匹配上就会调用spi_match_device,也就是spi_bus_type.match函数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 static int spi_match_device (struct device *dev, struct device_driver *drv) { const struct spi_device *spi = const struct spi_driver *sdrv = if (spi->driver_override) return strcmp (spi->driver_override, drv->name) == 0 ; if (of_driver_match_device(dev, drv)) return 1 ; if (acpi_driver_match_device(dev, drv)) return 1 ; if (sdrv->id_table) return !!spi_match_id(sdrv->id_table, spi); return strcmp (spi->modalias, drv->name) == 0 ; }
通过of_match_table的compatible和设备树匹配;
通过acpi_match_table的compatible和device的of_node的compatible匹配;
通过驱动和设备的id_table去匹配。
最后通过驱动和设备的名字去匹配。
匹配过程参考[字符设备驱动-2.总线/平台设备/平台驱动模型
字符设备驱动-2-总线模型和平台设备驱动 | Hexo (fuzidage.github.io) 。
1.1.2 核心层API 1.1.2.1 spi_register_master-(供适配层调用) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 int spi_register_master (struct spi_master *master) { ... status = of_spi_register_master(master); if (status) return status; ... dev_set_name(&master->dev, "spi%u" , master->bus_num); status = device_add(&master->dev); if (status < 0 ) goto done; dev_dbg(dev, "registered master %s%s\n" , dev_name(&master->dev), dynamic ? " (dynamic)" : "" ); if (master->transfer) dev_info(dev, "master is unqueued, this is deprecated\n" ); else { status = spi_master_initialize_queue(master); if (status) { device_del(&master->dev); goto done; } } ... mutex_lock(&board_lock); list_add_tail(&master->list , &spi_master_list); list_for_each_entry(bi, &board_list, list ) spi_match_master_to_boardinfo(master, &bi->board_info); mutex_unlock(&board_lock); ... of_register_spi_devices(master); ... done: return status; }
of_spi_register_master,根据设备树节点中的"cs-gpios",向struct spi_master添加gpio cs引脚。
device_add将device注册到设备模型中。
如果控制器驱动没有自己实现transfer函数,则初始化发送队列spi_master_initialize_queue。(核心层填充默认transfer函数)
spi_match_master_to_boardinfo老的方式,遍历所有spi_board_info数据结构,并注册spi_device
of_register_spi_devices新的设备树方式,遍历spi控制器节点下所有子节点,并注册成对应的spi_device设备
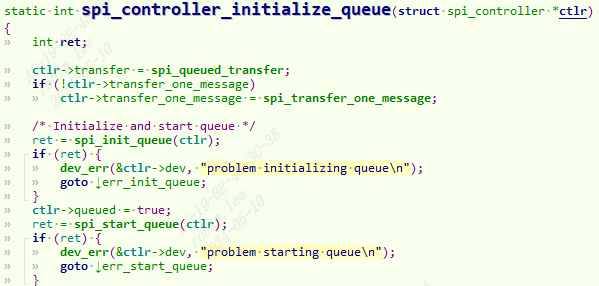
1.1.2.1.1 spi_controller_initialize_queue/spi_master_initialize_queue
可以看到是对控制器spi_master(或者叫做spi_controller)成员函数赋值。transfer_one_message或者transfer赋值成默认的函数。然后调用spi_init_queue和spi_start_queue函数初始化队列并启动工作线程。spi_init_queue函数最主要的作用就是建立一个内核工作线程。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 static int spi_init_queue (struct spi_master *master) { ...... kthread_init_worker(&master->kworker); master->kworker_task = kthread_run(kthread_worker_fn, &master->kworker, "%s" , dev_name(&master->dev)); ...... kthread_init_work(&master->pump_messages, spi_pump_messages); ...... return 0 ; } static int spi_start_queue (struct spi_master *master) { ...... master->running = true ; master->cur_msg = NULL ; ...... kthread_queue_work(&master->kworker, &master->pump_messages); ...... return 0 ; }
1.1.2.2 spi_message_init-(供从设备调用) 对spi_massage进行初始化.
1 2 3 4 5 6 7 8 9 10 static inline void spi_message_init_no_memset (struct spi_message *m) { INIT_LIST_HEAD(&m->transfers); INIT_LIST_HEAD(&m->resources); } static inline void spi_message_init (struct spi_message *m) { memset (m, 0 , sizeof *m); spi_message_init_no_memset(m); }
1.1.2.3 spi_message_add_tail-(供从设备调用) 1 2 3 4 static inline void spi_message_add_tail (struct spi_transfer *t, struct spi_message *m) { list_add_tail(&t->transfer_list, &m->transfers); }
可以看到就是把spi_transfer这个buffer添加到spi_message传输链表中。
1.1.2.4 spi_async-(供从设备调用) 发起数据传输。可以看到就是调用控制器内部的master->transfer。既然是async那就是异步执行的,不会等待传输是否完成,就直接返回。
1 2 3 spi_async-> __spi_async-> master->transfer
那假如master->transfer控制器这边没有去实现。内核会自己填充默认的transfer函数spi_queued_transfer.
1.1.2.4.1 spi_queued_transfer 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 spi_queued_transfer(struct spi_device *spi, struct spi_message *msg) { __spi_queued_transfer(spi, msg, true ); } static int __spi_queued_transfer(struct spi_device *spi, struct spi_message *msg, bool need_pump) { struct spi_master *master = unsigned long flags; spin_lock_irqsave(&master->queue_lock, flags); ... list_add_tail(&msg->queue , &master->queue ); if (!master->busy && need_pump) kthread_queue_work(&master->kworker, &master->pump_messages); spin_unlock_irqrestore(&master->queue_lock, flags); return 0 ; }
可以看到默认的spi_queued_transfer就是去把message添加到master的发送链表中。接下来就交给工作服务线程__spi_pump_messages去处理message。
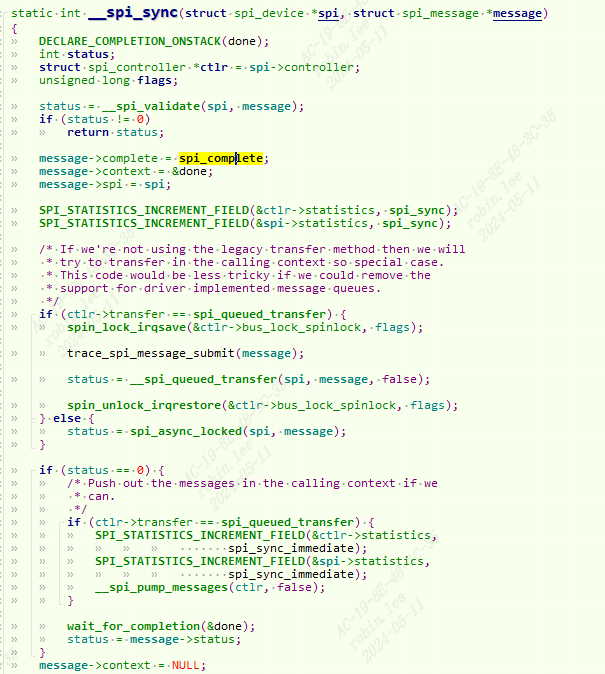
1.1.2.4 spi_sync-(供从设备调用)
同理,spi_sync就是用来同步传输 spi_message, 完成传输后会调用spi_comlete唤醒等待的线程。
那假如master->transfer控制器这边没有去实现。内核也会自己填充默认的transfer函数spi_queued_transfer.可以看到need_pump=false,因此还是一样就是去把message添加到master的发送链表中。
然后调用__spi_pump_messages,也就是工作线程服务,交给工作服务线程去处理message。
最后调用wait_for_completion去等待传输完成。
1.1.2.5 spi_bitbang_start-(供适配层调用) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 int spi_bitbang_start (struct spi_bitbang *bitbang) { struct spi_master *master = int ret; if (!master || !bitbang->chipselect) return -EINVAL; mutex_init(&bitbang->lock); if (!master->mode_bits) master->mode_bits = SPI_CPOL | SPI_CPHA | bitbang->flags; if (master->transfer || master->transfer_one_message) return -EINVAL; master->prepare_transfer_hardware = spi_bitbang_prepare_hardware; master->unprepare_transfer_hardware = spi_bitbang_unprepare_hardware; master->transfer_one = spi_bitbang_transfer_one; master->set_cs = spi_bitbang_set_cs; if (!bitbang->txrx_bufs) { bitbang->use_dma = 0 ; bitbang->txrx_bufs = spi_bitbang_bufs; if (!master->setup) { if (!bitbang->setup_transfer) bitbang->setup_transfer = spi_bitbang_setup_transfer; master->setup = spi_bitbang_setup; master->cleanup = spi_bitbang_cleanup; } } ret = spi_register_master(spi_master_get(master)); if (ret) spi_master_put(master); return ret; }
如果主设备结构体中的传输模式位字段 mode_bits 未设置,则设置为默认的模式位,包括 SPI_CPOL、SPI_CPHA 和位移传输控制结构体中的标志位。
检查主设备结构体中的传输函数是否已经定义,如果已定义则返回错误码 -EINVAL。
设置主设备结构体中的准备硬件传输函数、释放硬件传输函数、单次传输函数和片选信号控制函数,分别对应位移传输控制结构体中的对应函数。
如果位移传输控制结构体中的数据缓冲区传输函数未定义,则设置使用 DMA 标志为 0,并将数据缓冲区传输函数设置为默认的位移传输函数 spi_bitbang_bufs。如果主设备结构体中的设置函数未定义,则设置使用默认的设置函数 spi_bitbang_setup 和清理函数 spi_bitbang_cleanup。
注册 SPI 主设备,将其添加到系统中。
1.1.2.5.1 spi_register_master 1.2 SPI控制器驱动层 控制器驱动就是用来实现spi_master中的成员函数。如transfer, transfer_one_message。基本流程是:申请 spi_master,然后初始化 spi_master,最后向 Linux 内核注册 spi_master。
1.2.1 SPI控制器API 1.2.1.1 spi_alloc_master 申请spi控制器内存。
struct spi_master *spi_alloc_master(struct device *dev, unsigned size);
dev:设备,一般是 platform_device 中的 dev 成员变量。
size:私有数据大小,可以通过 spi_master_get_devdata 函数获取到这些私有数据。
返回值:申请到的 spi_master。
1.2.1.2 spi_master_put spi_master 的释放通过 spi_master_put函数来完成,当我们删除一个 SPI 主机驱动的时候就 需要释放掉前面申请的 spi_master,spi_master_put 函数原型如下:
void spi_master_put(struct spi_master *master);
释放spi控制器内存。
1.2.1.3 spi_register_master/spi_register_controller 当 spi_master 初始化完成以后就需要将其注册到 Linux 内核,spi_register_master注册spi控制器。
int spi_register_master(struct spi_master *master);
1.2.1.4 spi_unregister_master/spi_unregister_controller spi控制器卸载。
void spi_unregister_master(struct spi_master *master);
1.2.2 SPI控制器示例 以飞思卡尔nxp官方spi驱动为例,文件位于linux\drivers\spi\spi-imx.c
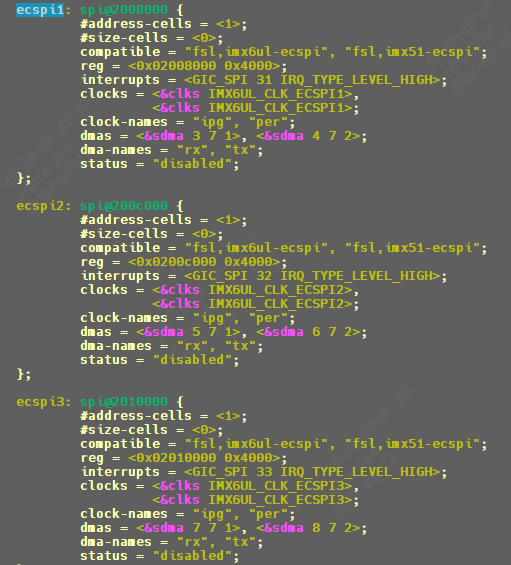
1.2.2.1 spi控制器设备树描述 打开设备树文件imx6ul.dtsi:
1 2 3 4 5 6 7 8 9 10 11 12 13 ecspi3: spi@2010000 { #address-cells = <1> ; #size-cells = <0> ; compatible = "fsl,imx6ul-ecspi" , "fsl,imx51-ecspi" ; reg = <0x02010000 0x4000 >; interrupts = <GIC_SPI 33 IRQ_TYPE_LEVEL_HIGH>; clocks = <&clks IMX6UL_CLK_ECSPI3>, <&clks IMX6UL_CLK_ECSPI3>; clock-names = "ipg" , "per" ; dmas = <&sdma 7 7 1 >, <&sdma 8 7 2 >; dma-names = "rx" , "tx" ; status = "disabled" ; };
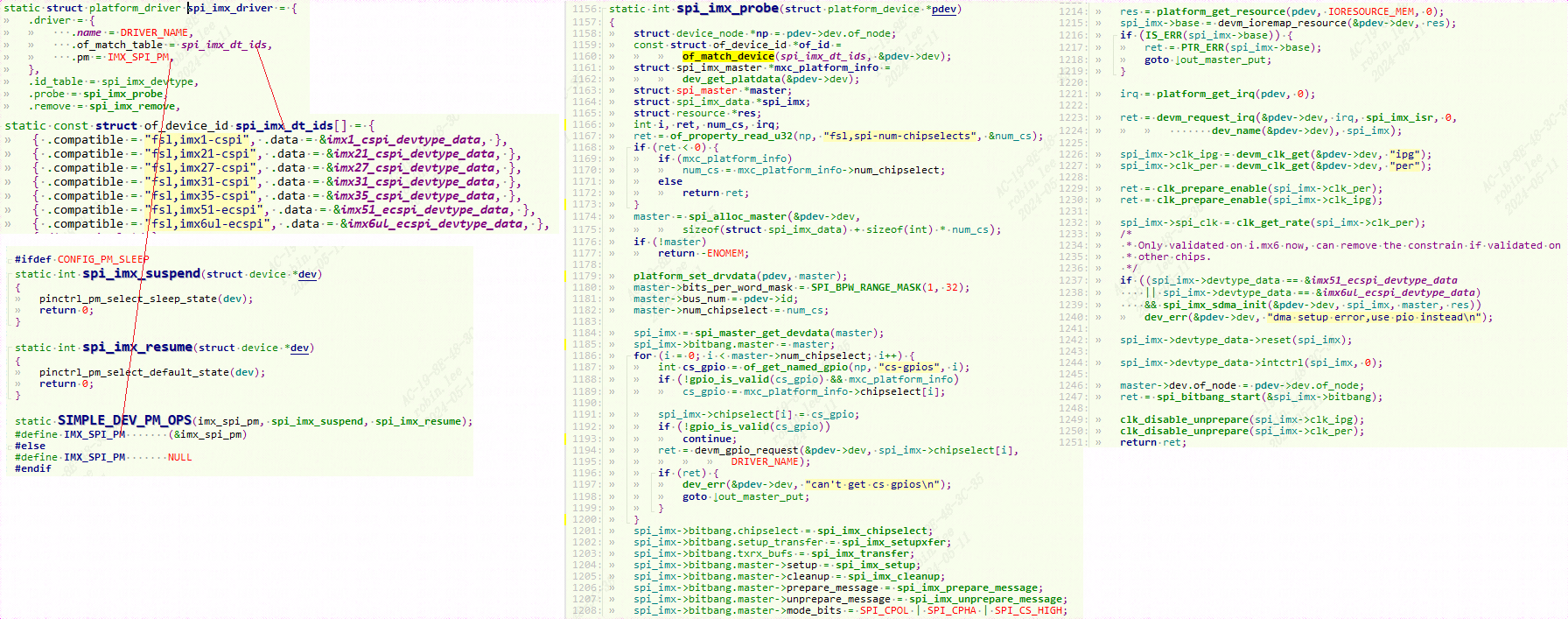
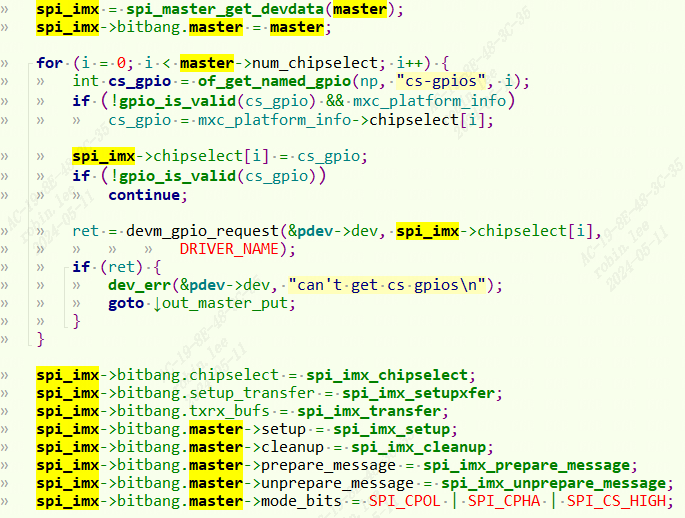
1.2.2.2 imx6ul spi控制器驱动 1.2.2.2.1 probe-(初始化spi_master)
解析设备树,初始化控制器
配置master和spi_imx。包括传输函数,片选函数,片选引脚。master作为平台设备的dev的driver_data, spi_imx作为master的dev的driver_data。
获取irq, res等信息,进行ioremap和注册irq。
设置时钟,开启时钟。
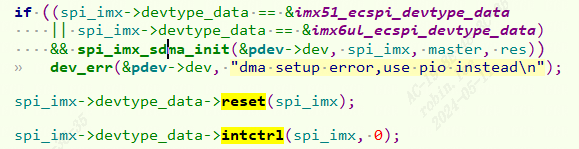
初始话dma寄存器。进行控制器初始化和复位。
申请并初始化 spi_master, 调用 spi_bitbang_start 函数(spi_bitbang_start 会调用 spi_register_master 函数)向 Linux 内核注册 spi_master。
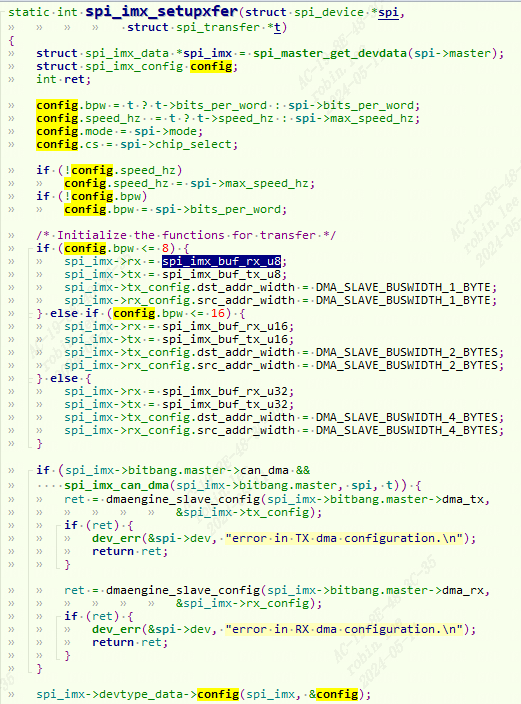
1.2.2.2.2 spi_imx_setupxfer-(设置位宽和配置控制器)
设置 spi_imx 的 tx 和 rx 传输函数。根据要发送的数据数据位宽的不 同,分别有 8 位、16 位和 32 位的发送函数:
1 2 3 4 5 6 spi_imx_buf_tx_u8 spi_imx_buf_tx_u16 spi_imx_buf_tx_u32 spi_imx_buf_rx_u8 spi_imx_buf_rx_u16 spi_imx_buf_rx_u32
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 #define MXC_SPI_BUF_RX(type) \ static void spi_imx_buf_rx_##type(struct spi_imx_data *spi_imx) \ { unsigned int val = readl(spi_imx->base + MXC_CSPIRXDATA); \ \ if (spi_imx->rx_buf) { \ *(type *)spi_imx->rx_buf = val; \ spi_imx->rx_buf += sizeof (type); \ } \ } #define MXC_SPI_BUF_TX(type) \ static void spi_imx_buf_tx_##type(struct spi_imx_data *spi_imx) \ { \ type val = 0 ; \ \ if (spi_imx->tx_buf) { \ val = *(type *)spi_imx->tx_buf; \ spi_imx->tx_buf += sizeof (type); \ } \ \ spi_imx->count -= sizeof (type); \ writel(val, spi_imx->base + MXC_CSPITXDATA); \ } MXC_SPI_BUF_RX(u8) MXC_SPI_BUF_TX(u8) MXC_SPI_BUF_RX(u16) MXC_SPI_BUF_TX(u16) MXC_SPI_BUF_RX(u32) MXC_SPI_BUF_TX(u32)
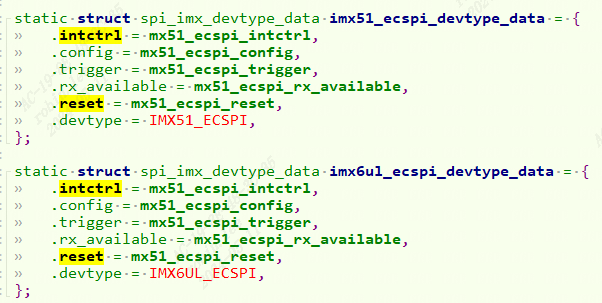
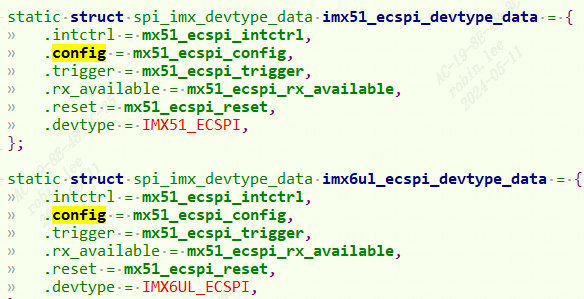
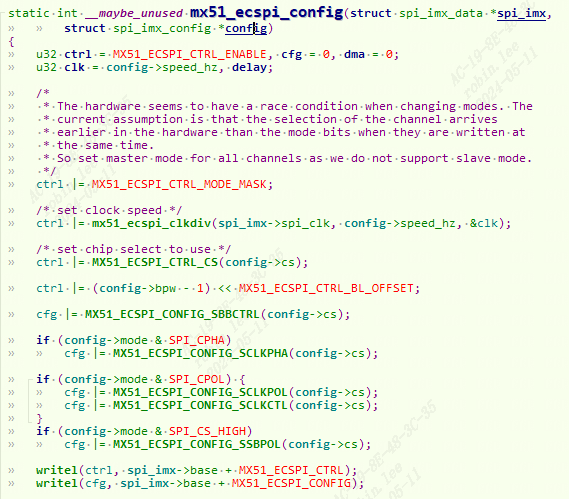
调用关系如下:mx51_ecspi_config就是最底层SPI controller的寄存器配置,这里不做分析。
1 2 spi_imx->bitbang.setup_transfer = spi_imx_setupxfer spi_imx->devtype_data->config = mx51_ecspi_config
1.2.2.2.3 spi_imx_transfer-(数据收发) 数据收发函数为 spi_imx_transfer:
1 2 3 4 spi_imx_transfer -> spi_imx_pio_transfer -> spi_imx_push -> spi_imx->tx
spi_imx 是个 spi_imx_data 类型的机构指针变量,其中 tx 和 rx 这两个成员变量分别为 SPI 数据发送和接收函数。
1 2 3 4 5 spi_bitbang_start中 ->master->transfer_one = spi_bitbang_transfer_one; 当spi_bitbang_transfer_on时 bitbang->txrx_bufs(spi,t) = spi_imx_transfer 也就是spi_imx->tx就可以spi_imx_buf_tx_u8
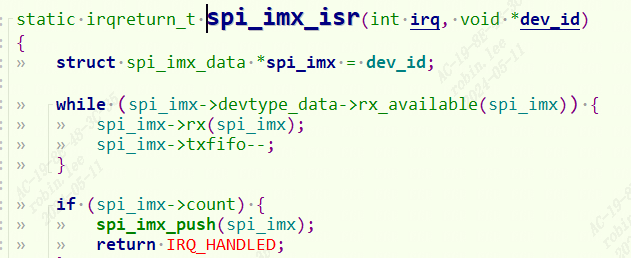
1.2.2.2.4 spi_imx_isr
中断服务程序,只要rx_available,启用spi_imx->rx。从MXC_CSPIRXDATA 寄存器读出数据。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 static int __maybe_unused mx51_ecspi_rx_available (struct spi_imx_data *spi_imx { return readl(spi_imx->base + MX51_ECSPI_STAT) & MX51_ECSPI_STAT_RR; } #define MXC_SPI_BUF_RX(type) \ static void spi_imx_buf_rx_##type(struct spi_imx_data *spi_imx) \ { \ unsigned int val = readl(spi_imx->base + MXC_CSPIRXDATA); \ \ if (spi_imx->rx_buf) { \ *(type *)spi_imx->rx_buf = val; \ spi_imx->rx_buf += sizeof (type); \ } \ }
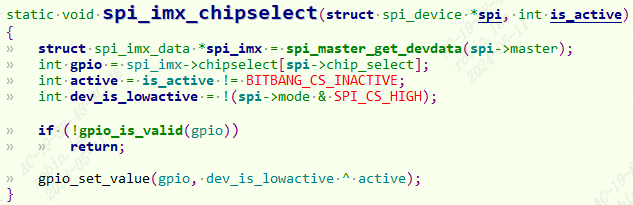
1.2.2.2.5 spi_imx_chipselect-(片选)
设置片选gpio电平。
1.3 SPI从设备驱动层 1.3.1 SPI从设备API 1.3.1.1 spi_message_init void spi_message_init(struct spi_message *m);
在使用spi_message之前需要对其进行初始化。
1.3.1.2 spi_message_add_tail void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m);
spi_message 初始化完成以后需要将 spi_transfer 添加到 spi_message 队列中。
1.3.1.3 spi_async 参考核心层api有介绍。
1.3.1.4 spi_sync 参考核心层api有介绍。
1.3.1.5 spi_register_driver 1.3.1.6 spi_unregister_driver 1.3.1.7 spi_read/spi_write 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 static inline void spi_message_init_with_transfers (struct spi_message *m, struct spi_transfer *xfers, unsigned int num_xfers) { unsigned int i; spi_message_init(m); for (i = 0 ; i < num_xfers; ++i) spi_message_add_tail(&xfers[i], m); } static inline int spi_sync_transfer (struct spi_device *spi, struct spi_transfer *xfers, unsigned int num_xfers) { struct spi_message msg ; spi_message_init_with_transfers(&msg, xfers, num_xfers); return spi_sync(spi, &msg); } static inline int spi_read (struct spi_device *spi, void *buf, size_t len) { struct spi_transfer t = .rx_buf = buf, .len = len, }; return spi_sync_transfer(spi, &t, 1 ); } static inline int spi_write (struct spi_device *spi, const void *buf, size_t len) { struct spi_transfer t = .tx_buf = buf, .len = len, }; return spi_sync_transfer(spi, &t, 1 ); }
spi_read, spi_write本质还是调用spi_sync传输函数,做了一层封装把spi_transfrer和spi_message包装好了。
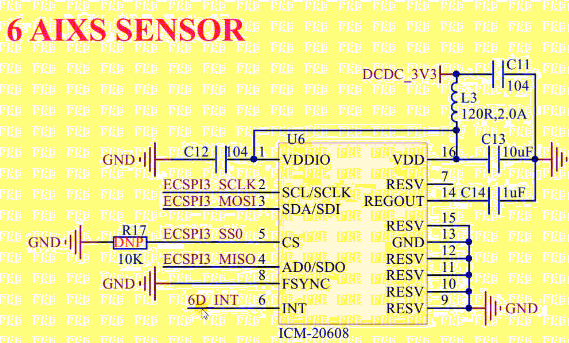
1.3.2 SPI从设备示例-ICM-20608-G 该传感器详细介绍:6轴陀螺仪加速度传感器ICM-20608-G
IMX6ULL SPI应用-6轴陀螺仪加速度传感器ICM-20608-G - fuzidage - 博客园 (cnblogs.com)
1.3.2.1 dts描述 打开自己board对应的dts,我这里是imx6ull-alientek-emmc.dts。我们修改ecspi3 spi控制器。我的spi3接了一个ICM-20608。资源定义如下:
根据原理图接线先配置iomux:
1 2 3 4 5 6 7 8 pinctrl_ecspi3: icm20608 { fsl,pins = < MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x10b0 MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x10b1 MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x10b1 MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x10b1 >; };
UART2_TX_DATA 这个 IO 是 ICM20608 的片选信号,这里我们并没有将其复用为 ECSPI3 的SS0信号,而是将其复用为了普通的 GPIO。因为我们需要自己控制片选信号,所以将其复 用为普通的 GPIO。
imx6ull-alientek-emmc.dts重新修改ecspi3节点,追加从设备描述:
1 2 3 4 5 6 7 8 9 10 11 12 13 &ecspi3 { fsl,spi-num-chipselects = <1 >; cs-gpios = <&gpio1 20 GPIO_ACTIVE_LOW>; pinctrl-names = "default" ; pinctrl-0 = <&pinctrl_ecspi3>; status = "okay" ; spidev: icm20608@0 { compatible = "alientek,icm20608" ; spi-max-frequency = <8000000 >; reg = <0 >; }; };
设置当前片选数量为 1,因为就只接了一个 ICM20608。
一定要使用 “cs-gpios”属性来描述片选引脚,SPI 主机驱动就会控制片选引脚。
imx6ull.dtsi 文件中默认将 ecspi3 节点状态(status)设置为“disable”,这里我们要将 其改为“okay”。 icm20608 设备子节点,因为 icm20608 连接在ECSPI3的第 0 个通道上,因此 @后面为 0。
设置节点属性兼容值为“alientek,icm20608”。
设置 SPI 最大时钟频 率为 8MHz,这是 ICM20608 的 SPI 接口所能支持的最大的时钟频率。
icm20608 连接 在通道 0 上,因此 reg 为 0。
1.3.2.1.1 spi从设备dts描述规则 打开linux\Documentation\devicetree\bindings\spi\spi-bus.txt
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 SPI slave nodes must be children of the SPI master node and can contain the following properties. - reg - (required) chip select address of device. - compatible - (required) name of SPI device following generic names recommended practice - spi-max-frequency - (required) Maximum SPI clocking speed of device in Hz - spi-cpol - (optional) Empty property indicating device requires inverse clock polarity (CPOL) mode - spi-cpha - (optional) Empty property indicating device requires shifted clock phase (CPHA) mode - spi-cs-high - (optional) Empty property indicating device requires chip select active high - spi-3wire - (optional) Empty property indicating device requires 3-wire mode. - spi-lsb-first - (optional) Empty property indicating device requires LSB first mode. - spi-tx-bus-width - (optional) The bus width (number of data wires) that used for MOSI. Defaults to 1 if not present. - spi-rx-bus-width - (optional) The bus width (number of data wires) that used for MISO. Defaults to 1 if not present.
1.3.2.2 ICM20608驱动 1.3.2.2.1 icm20608reg.h 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 #ifndef ICM20608_H #define ICM20608_H #define ICM20608G_ID 0XAF #define ICM20608D_ID 0XAE #define ICM20_SELF_TEST_X_GYRO 0x00 #define ICM20_SELF_TEST_Y_GYRO 0x01 #define ICM20_SELF_TEST_Z_GYRO 0x02 #define ICM20_SELF_TEST_X_ACCEL 0x0D #define ICM20_SELF_TEST_Y_ACCEL 0x0E #define ICM20_SELF_TEST_Z_ACCEL 0x0F #define ICM20_XG_OFFS_USRH 0x13 #define ICM20_XG_OFFS_USRL 0x14 #define ICM20_YG_OFFS_USRH 0x15 #define ICM20_YG_OFFS_USRL 0x16 #define ICM20_ZG_OFFS_USRH 0x17 #define ICM20_ZG_OFFS_USRL 0x18 #define ICM20_SMPLRT_DIV 0x19 #define ICM20_CONFIG 0x1A #define ICM20_GYRO_CONFIG 0x1B #define ICM20_ACCEL_CONFIG 0x1C #define ICM20_ACCEL_CONFIG2 0x1D #define ICM20_LP_MODE_CFG 0x1E #define ICM20_ACCEL_WOM_THR 0x1F #define ICM20_FIFO_EN 0x23 #define ICM20_FSYNC_INT 0x36 #define ICM20_INT_PIN_CFG 0x37 #define ICM20_INT_ENABLE 0x38 #define ICM20_INT_STATUS 0x3A #define ICM20_ACCEL_XOUT_H 0x3B #define ICM20_ACCEL_XOUT_L 0x3C #define ICM20_ACCEL_YOUT_H 0x3D #define ICM20_ACCEL_YOUT_L 0x3E #define ICM20_ACCEL_ZOUT_H 0x3F #define ICM20_ACCEL_ZOUT_L 0x40 #define ICM20_TEMP_OUT_H 0x41 #define ICM20_TEMP_OUT_L 0x42 #define ICM20_GYRO_XOUT_H 0x43 #define ICM20_GYRO_XOUT_L 0x44 #define ICM20_GYRO_YOUT_H 0x45 #define ICM20_GYRO_YOUT_L 0x46 #define ICM20_GYRO_ZOUT_H 0x47 #define ICM20_GYRO_ZOUT_L 0x48 #define ICM20_SIGNAL_PATH_RESET 0x68 #define ICM20_ACCEL_INTEL_CTRL 0x69 #define ICM20_USER_CTRL 0x6A #define ICM20_PWR_MGMT_1 0x6B #define ICM20_PWR_MGMT_2 0x6C #define ICM20_FIFO_COUNTH 0x72 #define ICM20_FIFO_COUNTL 0x73 #define ICM20_FIFO_R_W 0x74 #define ICM20_WHO_AM_I 0x75 #define ICM20_XA_OFFSET_H 0x77 #define ICM20_XA_OFFSET_L 0x78 #define ICM20_YA_OFFSET_H 0x7A #define ICM20_YA_OFFSET_L 0x7B #define ICM20_ZA_OFFSET_H 0x7D #define ICM20_ZA_OFFSET_L 0x7E #endif
1.3.2.2.2 icm20608.c
点击查看代码
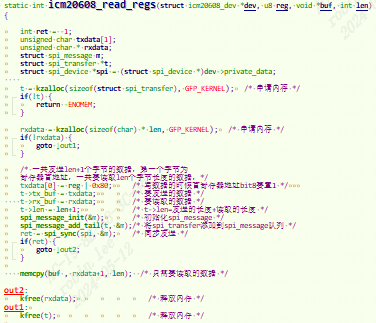
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 #include <linux/types.h> #include <linux/kernel.h> #include <linux/delay.h> #include <linux/ide.h> #include <linux/init.h> #include <linux/module.h> #include <linux/errno.h> #include <linux/gpio.h> #include <linux/cdev.h> #include <linux/device.h> #include <linux/of_gpio.h> #include <linux/semaphore.h> #include <linux/timer.h> #include <linux/i2c.h> #include <linux/spi/spi.h> #include <linux/of.h> #include <linux/of_address.h> #include <linux/of_gpio.h> #include <linux/platform_device.h> #include <asm/mach/map.h> #include <asm/uaccess.h> #include <asm/io.h> #include "icm20608reg.h" #define ICM20608_CNT 1 #define ICM20608_NAME "icm20608" struct icm20608_dev { dev_t devid; struct cdev cdev ; struct class *class ; struct device *device ; struct device_node *nd ; int major; void *private_data; signed int gyro_x_adc; signed int gyro_y_adc; signed int gyro_z_adc; signed int accel_x_adc; signed int accel_y_adc; signed int accel_z_adc; signed int temp_adc; }; static struct icm20608_dev icm20608dev ;static int icm20608_read_regs (struct icm20608_dev *dev, u8 reg, void *buf, int len) { int ret = -1 ; unsigned char txdata[1 ]; unsigned char * rxdata; struct spi_message m ; struct spi_transfer *t ; struct spi_device *spi =struct spi_device *)dev->private_data; t = kzalloc(sizeof (struct spi_transfer), GFP_KERNEL); if (!t) { return -ENOMEM; } rxdata = kzalloc(sizeof (char ) * len, GFP_KERNEL); if (!rxdata) { goto out1; } #if 1 txdata[0 ] = reg | 0x80 ; t->tx_buf = txdata; t->rx_buf = rxdata; t->len = len+1 ; spi_message_init(&m); spi_message_add_tail(t, &m); ret = spi_sync(spi, &m); #else txdata[0 ] = reg | 0x80 ; t->tx_buf = txdata; t->len = 1 ; spi_message_init(&m); spi_message_add_tail(t, &m); ret = spi_sync(spi, &m); txdata[0 ] = 0xff ; t->rx_buf = buf; t->len = len; spi_message_init(&m); spi_message_add_tail(t, &m); ret = spi_sync(spi, &m); #endif if (ret) { goto out2; } memcpy (buf , rxdata+1 , len); out2: kfree(rxdata); out1: kfree(t); return ret; } static s32 icm20608_write_regs (struct icm20608_dev *dev, u8 reg, u8 *buf, u8 len) { int ret = -1 ; unsigned char *txdata; struct spi_message m ; struct spi_transfer *t ; struct spi_device *spi =struct spi_device *)dev->private_data; t = kzalloc(sizeof (struct spi_transfer), GFP_KERNEL); if (!t) { return -ENOMEM; } txdata = kzalloc(sizeof (char )+len, GFP_KERNEL); if (!txdata) { goto out1; } #if 1 *txdata = reg & ~0x80 ; memcpy (txdata+1 , buf, len); t->tx_buf = txdata; t->len = len+1 ; spi_message_init(&m); spi_message_add_tail(t, &m); ret = spi_sync(spi, &m); #else txdata[0 ] = reg & ~0x80 ; t->tx_buf = txdata; t->len = 1 ; spi_message_init(&m); spi_message_add_tail(t, &m); ret = spi_sync(spi, &m); t->tx_buf = buf; t->len = len; spi_message_init(&m); spi_message_add_tail(t, &m); ret = spi_sync(spi, &m); #endif if (ret) { goto out2; } out2: kfree(txdata); out1: kfree(t); return ret; } static unsigned char icm20608_read_onereg (struct icm20608_dev *dev, u8 reg) { u8 data = 0 ; icm20608_read_regs(dev, reg, &data, 1 ); return data; } static void icm20608_write_onereg (struct icm20608_dev *dev, u8 reg, u8 value) { u8 buf = value; icm20608_write_regs(dev, reg, &buf, 1 ); } void icm20608_readdata (struct icm20608_dev *dev) { unsigned char data[14 ] = { 0 }; icm20608_read_regs(dev, ICM20_ACCEL_XOUT_H, data, 14 ); dev->accel_x_adc = (signed short )((data[0 ] << 8 ) | data[1 ]); dev->accel_y_adc = (signed short )((data[2 ] << 8 ) | data[3 ]); dev->accel_z_adc = (signed short )((data[4 ] << 8 ) | data[5 ]); dev->temp_adc = (signed short )((data[6 ] << 8 ) | data[7 ]); dev->gyro_x_adc = (signed short )((data[8 ] << 8 ) | data[9 ]); dev->gyro_y_adc = (signed short )((data[10 ] << 8 ) | data[11 ]); dev->gyro_z_adc = (signed short )((data[12 ] << 8 ) | data[13 ]); } static int icm20608_open (struct inode *inode, struct file *filp) { filp->private_data = &icm20608dev; return 0 ; } static ssize_t icm20608_read (struct file *filp, char __user *buf, size_t cnt, loff_t *off) { signed int data[7 ]; long err = 0 ; struct icm20608_dev *dev =struct icm20608_dev *)filp->private_data; icm20608_readdata(dev); data[0 ] = dev->gyro_x_adc; data[1 ] = dev->gyro_y_adc; data[2 ] = dev->gyro_z_adc; data[3 ] = dev->accel_x_adc; data[4 ] = dev->accel_y_adc; data[5 ] = dev->accel_z_adc; data[6 ] = dev->temp_adc; err = copy_to_user(buf, data, sizeof (data)); return 0 ; } static int icm20608_release (struct inode *inode, struct file *filp) { return 0 ; } static const struct file_operations icm20608_ops = .owner = THIS_MODULE, .open = icm20608_open, .read = icm20608_read, .release = icm20608_release, }; void icm20608_reginit (void ) { u8 value = 0 ; icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_1, 0x80 ); mdelay(50 ); icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_1, 0x01 ); mdelay(50 ); value = icm20608_read_onereg(&icm20608dev, ICM20_WHO_AM_I); printk("ICM20608 ID = %#X\r\n" , value); icm20608_write_onereg(&icm20608dev, ICM20_SMPLRT_DIV, 0x00 ); icm20608_write_onereg(&icm20608dev, ICM20_GYRO_CONFIG, 0x18 ); icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG, 0x18 ); icm20608_write_onereg(&icm20608dev, ICM20_CONFIG, 0x04 ); icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG2, 0x04 ); icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_2, 0x00 ); icm20608_write_onereg(&icm20608dev, ICM20_LP_MODE_CFG, 0x00 ); icm20608_write_onereg(&icm20608dev, ICM20_FIFO_EN, 0x00 ); } static int icm20608_probe (struct spi_device *spi) { if (icm20608dev.major) { icm20608dev.devid = MKDEV(icm20608dev.major, 0 ); register_chrdev_region(icm20608dev.devid, ICM20608_CNT, ICM20608_NAME); } else { alloc_chrdev_region(&icm20608dev.devid, 0 , ICM20608_CNT, ICM20608_NAME); icm20608dev.major = MAJOR(icm20608dev.devid); } cdev_init(&icm20608dev.cdev, &icm20608_ops); cdev_add(&icm20608dev.cdev, icm20608dev.devid, ICM20608_CNT); icm20608dev.class = class_create(THIS_MODULE, ICM20608_NAME); if (IS_ERR(icm20608dev.class)) { return PTR_ERR(icm20608dev.class); } icm20608dev.device = device_create(icm20608dev.class, NULL , icm20608dev.devid, NULL , ICM20608_NAME); if (IS_ERR(icm20608dev.device)) { return PTR_ERR(icm20608dev.device); } spi->mode = SPI_MODE_0; spi_setup(spi); icm20608dev.private_data = spi; icm20608_reginit(); return 0 ; } static int icm20608_remove (struct spi_device *spi) { cdev_del(&icm20608dev.cdev); unregister_chrdev_region(icm20608dev.devid, ICM20608_CNT); device_destroy(icm20608dev.class, icm20608dev.devid); class_destroy(icm20608dev.class); return 0 ; } static const struct spi_device_id icm20608_id [] = {"alientek,icm20608" , 0 }, {} }; static const struct of_device_id icm20608_of_match [] = { .compatible = "alientek,icm20608" }, { } }; static struct spi_driver icm20608_driver = .probe = icm20608_probe, .remove = icm20608_remove, .driver = { .owner = THIS_MODULE, .name = "icm20608" , .of_match_table = icm20608_of_match, }, .id_table = icm20608_id, }; static int __init icm20608_init (void ) { return spi_register_driver(&icm20608_driver); } static void __exit icm20608_exit (void ) { spi_unregister_driver(&icm20608_driver); } module_init(icm20608_init); module_exit(icm20608_exit); MODULE_LICENSE("GPL" );
1.3.2.2.2.1 驱动过程分析
作为一个spi从设备驱动,需要定义一个spi_driver icm20608_driver。通过spi_register_driver、spi_unregister_driver注册卸载。
compatible匹配执行probe。
定一个icm20608_dev,按照字符设备框架,注册字符设备。
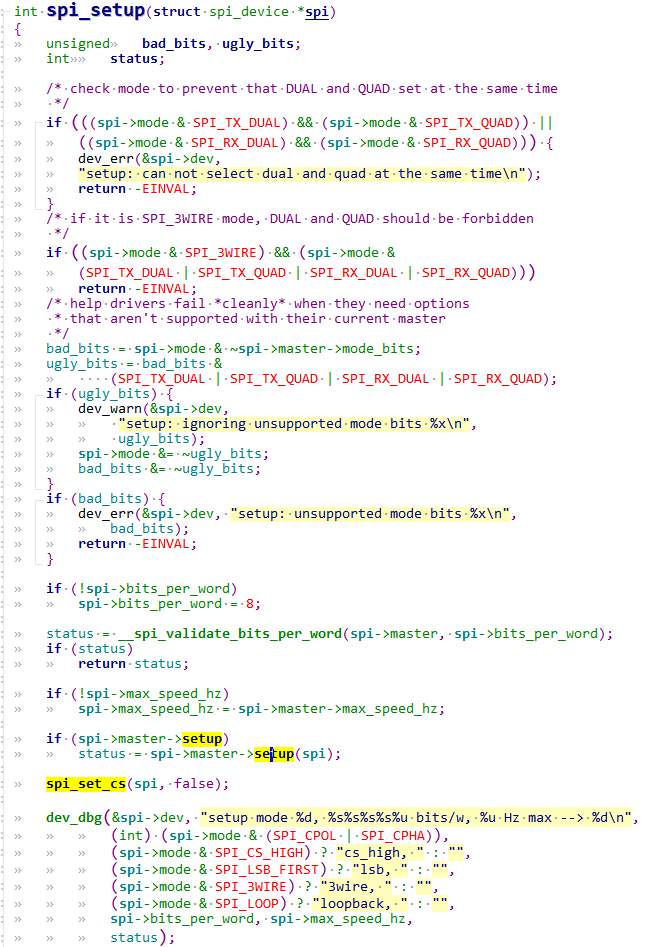
spi_setup设置spi_device从设备, 设置spi设备的模式和速率。初始化ICM20608内部寄存器(发起spi传输)。
设置启动时序,使能读写。
读id。
设置量程,速率。
ICM20608的读写
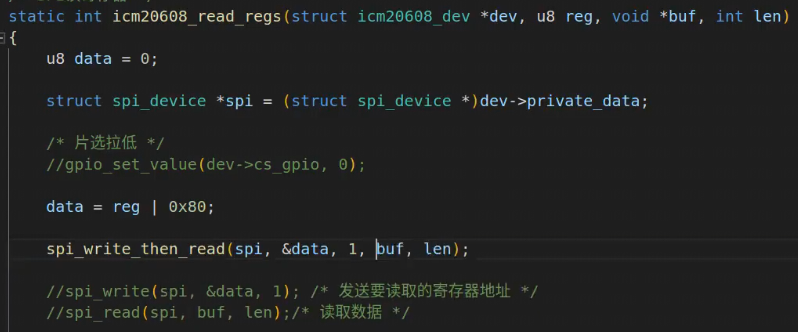
icm20608_read调用icm20608_readdata,调用icm20608_read_regs
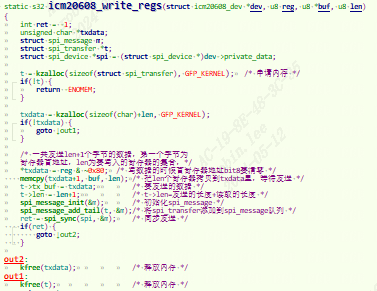
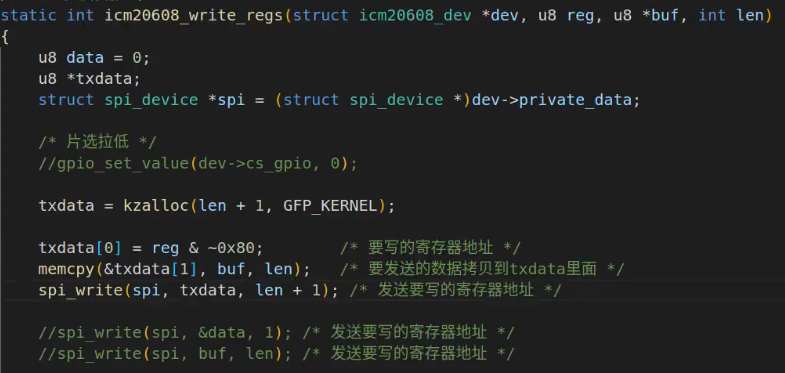
icm20608_write_regs, icm20608_read_regs用来spi协议让主控去读写spi从设备,都是通过spi_sync进行数据传输。
将函数精简话一下:
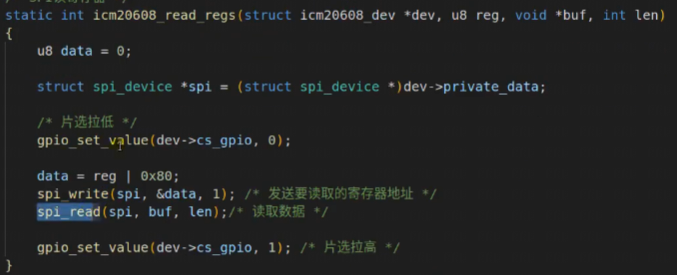
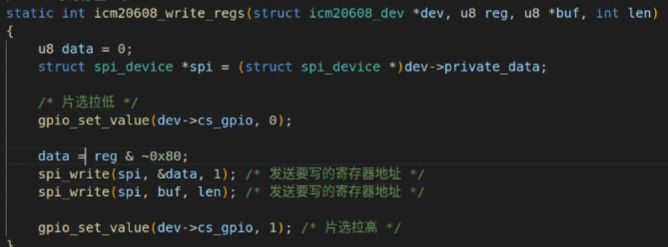
注意精简后有个bug, 就是调用spi_write后,又继续调用spi_read。这时imx6ul spi控制器驱动内部会帮忙控制cs片选信号。又会重新拉高,再拉低cs片选。因此导致数据传输异常。nxp官方也是用的gpio作为cs片选,软件手动去控制的。因此优化如下:
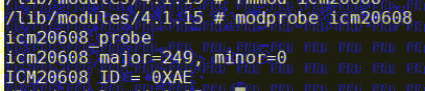
probe读出icm20608 id为:
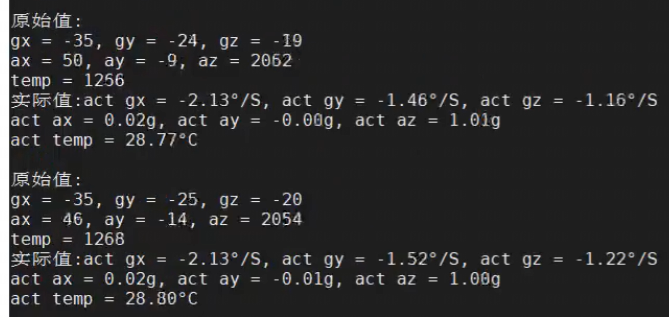
1.3.2.2.3 icm20608App.c 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 #include "stdio.h" #include "unistd.h" #include "sys/types.h" #include "sys/stat.h" #include "sys/ioctl.h" #include "fcntl.h" #include "stdlib.h" #include "string.h" #include <poll.h> #include <sys/select.h> #include <sys/time.h> #include <signal.h> #include <fcntl.h> int main (int argc, char *argv[]) { int fd; char *filename; signed int databuf[7 ]; unsigned char data[14 ]; signed int gyro_x_adc, gyro_y_adc, gyro_z_adc; signed int accel_x_adc, accel_y_adc, accel_z_adc; signed int temp_adc; float gyro_x_act, gyro_y_act, gyro_z_act; float accel_x_act, accel_y_act, accel_z_act; float temp_act; int ret = 0 ; if (argc != 2 ) { printf ("Error Usage!\r\n" ); return -1 ; } filename = argv[1 ]; fd = open(filename, O_RDWR); if (fd < 0 ) { printf ("can't open file %s\r\n" , filename); return -1 ; } while (1 ) { ret = read(fd, databuf, sizeof (databuf)); if (ret == 0 ) { gyro_x_adc = databuf[0 ]; gyro_y_adc = databuf[1 ]; gyro_z_adc = databuf[2 ]; accel_x_adc = databuf[3 ]; accel_y_adc = databuf[4 ]; accel_z_adc = databuf[5 ]; temp_adc = databuf[6 ]; gyro_x_act = (float )(gyro_x_adc) / 16.4 ; gyro_y_act = (float )(gyro_y_adc) / 16.4 ; gyro_z_act = (float )(gyro_z_adc) / 16.4 ; accel_x_act = (float )(accel_x_adc) / 2048 ; accel_y_act = (float )(accel_y_adc) / 2048 ; accel_z_act = (float )(accel_z_adc) / 2048 ; temp_act = ((float )(temp_adc) - 25 ) / 326.8 + 25 ; printf ("\r\n原始值:\r\n" ); printf ("gx = %d, gy = %d, gz = %d\r\n" , gyro_x_adc, gyro_y_adc, gyro_z_adc); printf ("ax = %d, ay = %d, az = %d\r\n" , accel_x_adc, accel_y_adc, accel_z_adc); printf ("temp = %d\r\n" , temp_adc); printf ("实际值:" ); printf ("act gx = %.2f°/S, act gy = %.2f°/S, act gz = %.2f°/S\r\n" , gyro_x_act, gyro_y_act, gyro_z_act); printf ("act ax = %.2fg, act ay = %.2fg, act az = %.2fg\r\n" , accel_x_act, accel_y_act, accel_z_act); printf ("act temp = %.2f°C\r\n" , temp_act); } usleep(100000 ); } close(fd); return 0 ; }
测试结果:
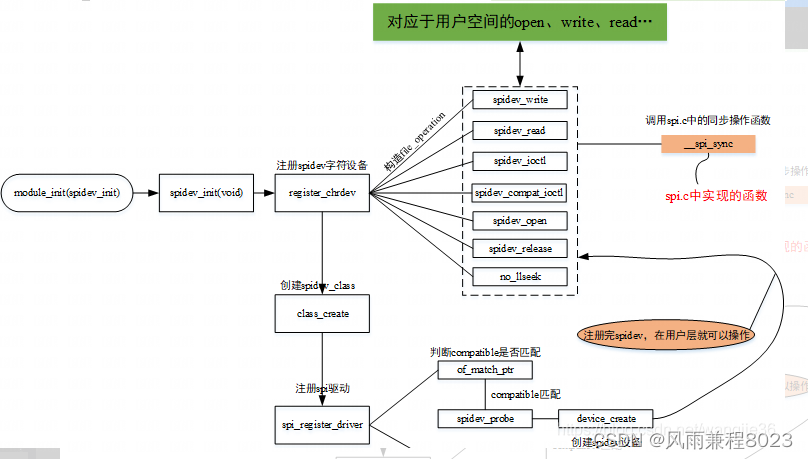
1.3.3 SPI万能从设备驱动-spidev.c 万能SPI从设备驱动对应spidev, 驱动代码位于/drivers/spi/spidev.c。不用为每个spi从设备去写一个驱动,linux内核有一个万能通用的从设备驱动。
为什么说spidev.c是一个通用的从设备驱动。
spidev不是专门针对某一SPI硬件设备做的驱动,只是简单的注册字符设备,用户空间通过read、write、ioctl,直接对spi进行操作,相当于是用户空间和spi设备的桥梁。用户空间操作时,打开设备节点,然后通过IOCTL设置模式、速度等参数,然后就可以调用read write进行操作了。
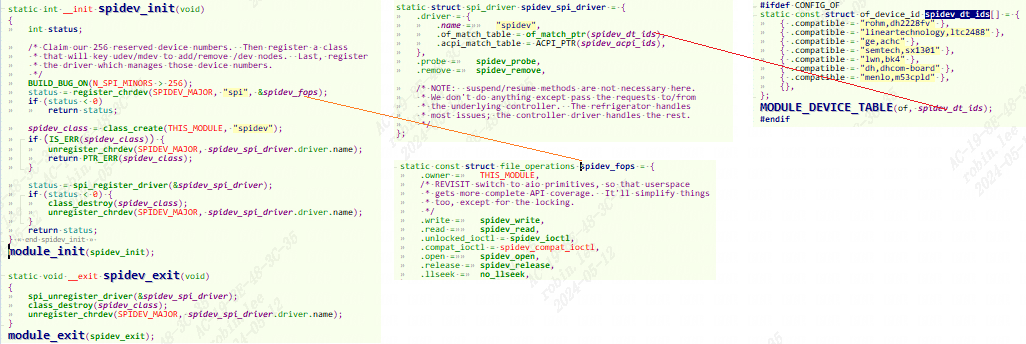
1.3.3.1 spidev_init
注册了字符设备,主设备号SPIDEV_MAJOR= 153,绑定spidev_fops。
创建了spidev的class,创建完成后在用户空间/sys/class/下可以看到spidev目录结构。
spi_register_driver按照标准流程注册spidev从设备驱动。
1.3.3.2 spidev的probe 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 static const struct of_device_id spidev_dt_ids [] = { .compatible = "rohm,dh2228fv" }, { .compatible = "lineartechnology,ltc2488" }, { .compatible = "ge,achc" }, { .compatible = "nanopi,spidev" }, { .compatible = "semtech,sx1301" }, {}, }; static struct spi_driver spidev_spi_driver = .driver = { .name = "spidev" , .of_match_table = of_match_ptr(spidev_dt_ids), .acpi_match_table = ACPI_PTR(spidev_acpi_ids), }, .probe = spidev_probe, .remove = spidev_remove, }; static int spidev_probe (struct spi_device *spi) { struct spidev_data *spidev ; int status; unsigned long minor; if (spi->dev.of_node && !of_match_device(spidev_dt_ids, &spi->dev)) { dev_err(&spi->dev, "buggy DT: spidev listed directly in DT\n" ); WARN_ON(spi->dev.of_node && !of_match_device(spidev_dt_ids, &spi->dev)); } spidev_probe_acpi(spi); spidev = kzalloc(sizeof (*spidev), GFP_KERNEL); if (!spidev) return -ENOMEM; spidev->spi = spi; spin_lock_init(&spidev->spi_lock); mutex_init(&spidev->buf_lock); INIT_LIST_HEAD(&spidev->device_entry); mutex_lock(&device_list_lock); minor = find_first_zero_bit(minors, N_SPI_MINORS); if (minor < N_SPI_MINORS) { struct device *dev ; spidev->devt = MKDEV(SPIDEV_MAJOR, minor); dev = device_create(spidev_class, &spi->dev, spidev->devt, spidev, "spidev%d.%d" , spi->master->bus_num, spi->chip_select); status = PTR_ERR_OR_ZERO(dev); } else { dev_dbg(&spi->dev, "no minor number available!\n" ); status = -ENODEV; } if (status == 0 ) { set_bit(minor, minors); list_add(&spidev->device_entry, &device_list); } mutex_unlock(&device_list_lock); spidev->speed_hz = spi->max_speed_hz; if (status == 0 ) spi_set_drvdata(spi, spidev); else kfree(spidev); return status; }
调用device_create创建了/dev/下的spidev节点,主设备号SPIDEV_MAJOR= 153,如spi总线0上cs1设备,则设备名为/dev/spidev0.1,其他以此类推。
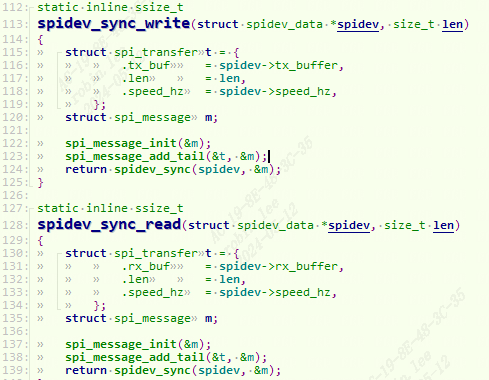
1.3.3.3 spidev_fops 1.3.3.3.1 spidev_read 1 2 3 4 spidev_read ->spidev_sync_read ->spidev_sync ->spi_sync
1.3.3.3.2 spidev_write 1 2 3 4 spidev_write ->spidev_sync_write ->spidev_sync ->spi_sync
构造spi_message,spi_transfer调用spi_sync进行数据传输。
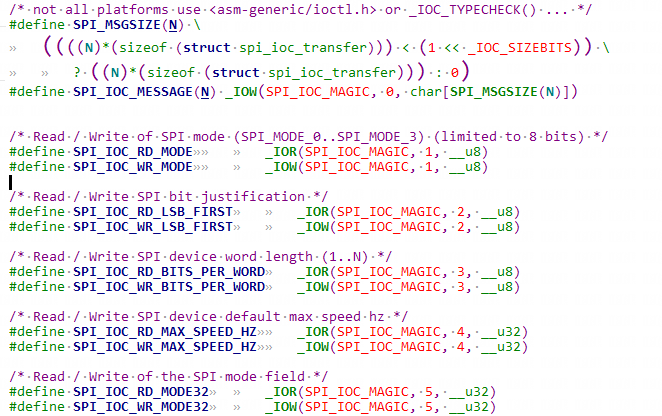
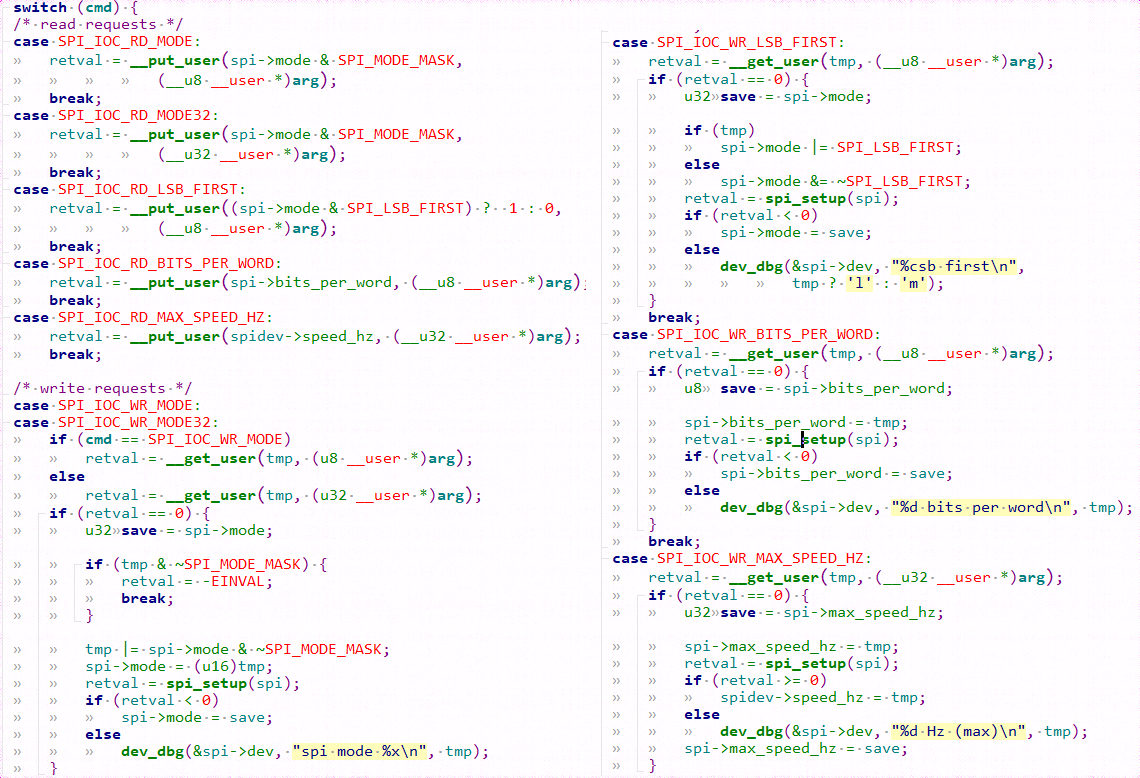
1.3.3.3.3 spidev_ioctl 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 static long spidev_ioctl (struct file *filp, unsigned int cmd, unsigned long arg) { int retval = 0 ; struct spidev_data *spidev ; struct spi_device *spi ; u32 tmp; unsigned n_ioc; struct spi_ioc_transfer *ioc ; if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC) return -ENOTTY; spidev = filp->private_data; spin_lock_irq(&spidev->spi_lock); spi = spi_dev_get(spidev->spi); spin_unlock_irq(&spidev->spi_lock); if (spi == NULL ) return -ESHUTDOWN; mutex_lock(&spidev->buf_lock); switch (cmd) { case SPI_IOC_RD_MODE: retval = put_user(spi->mode & SPI_MODE_MASK, (__u8 __user *)arg); break ; case SPI_IOC_RD_MODE32: retval = put_user(spi->mode & SPI_MODE_MASK, (__u32 __user *)arg); break ; case SPI_IOC_RD_LSB_FIRST: retval = put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0 , (__u8 __user *)arg); break ; case SPI_IOC_RD_BITS_PER_WORD: retval = put_user(spi->bits_per_word, (__u8 __user *)arg); break ; case SPI_IOC_RD_MAX_SPEED_HZ: retval = put_user(spidev->speed_hz, (__u32 __user *)arg); break ; case SPI_IOC_WR_MODE: case SPI_IOC_WR_MODE32: if (cmd == SPI_IOC_WR_MODE) retval = get_user(tmp, (u8 __user *)arg); else retval = get_user(tmp, (u32 __user *)arg); if (retval == 0 ) { struct spi_controller *ctlr = u32 save = spi->mode; if (tmp & ~SPI_MODE_MASK) { retval = -EINVAL; break ; } if (ctlr->use_gpio_descriptors && ctlr->cs_gpiods && ctlr->cs_gpiods[spi->chip_select]) tmp |= SPI_CS_HIGH; tmp |= spi->mode & ~SPI_MODE_MASK; spi->mode = (u16)tmp; retval = spi_setup(spi); if (retval < 0 ) spi->mode = save; else dev_dbg(&spi->dev, "spi mode %x\n" , tmp); } break ; case SPI_IOC_WR_LSB_FIRST: retval = get_user(tmp, (__u8 __user *)arg); if (retval == 0 ) { u32 save = spi->mode; if (tmp) spi->mode |= SPI_LSB_FIRST; else spi->mode &= ~SPI_LSB_FIRST; retval = spi_setup(spi); if (retval < 0 ) spi->mode = save; else dev_dbg(&spi->dev, "%csb first\n" , tmp ? 'l' : 'm' ); } break ; case SPI_IOC_WR_BITS_PER_WORD: retval = get_user(tmp, (__u8 __user *)arg); if (retval == 0 ) { u8 save = spi->bits_per_word; spi->bits_per_word = tmp; retval = spi_setup(spi); if (retval < 0 ) spi->bits_per_word = save; else dev_dbg(&spi->dev, "%d bits per word\n" , tmp); } break ; case SPI_IOC_WR_MAX_SPEED_HZ: retval = get_user(tmp, (__u32 __user *)arg); if (retval == 0 ) { u32 save = spi->max_speed_hz; spi->max_speed_hz = tmp; retval = spi_setup(spi); if (retval == 0 ) { spidev->speed_hz = tmp; dev_dbg(&spi->dev, "%d Hz (max)\n" , spidev->speed_hz); } spi->max_speed_hz = save; } break ; default : ioc = spidev_get_ioc_message(cmd, (struct spi_ioc_transfer __user *)arg, &n_ioc); if (IS_ERR(ioc)) { retval = PTR_ERR(ioc); break ; } if (!ioc) break ; retval = spidev_message(spidev, ioc, n_ioc); kfree(ioc); break ; } mutex_unlock(&spidev->buf_lock); spi_dev_put(spi); return retval; }
这些SPI_IOC命令就是一些设置速率参数,spi模式啊,然后就可以通过read,write操作/dev/spidev%d.%d设备了。
1.3.4 使用SPI万能驱动oled举例 1.3.4.1 spi oled原理 见SPI-OLED显示面板介绍
S3c2440裸机-spi编程-2.OLED显示面板 - fuzidage - 博客园 (cnblogs.com)
S3c2440裸机-spi编程-3.gpio模拟spi驱动OLED - fuzidage - 博客园 (cnblogs.com) 。
1.3.4.2 spi_oled.c 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 #include <stdio.h> #include <unistd.h> #include <stdlib.h> #include <fcntl.h> #include <string.h> #include <sys/ioctl.h> #include <sys/types.h> #include <sys/stat.h> #include <linux/types.h> #include <linux/spi/spidev.h> #include "font.h" static int fd_spidev;static int dc_pin_num;void OLED_DIsp_Set_Pos (int x, int y) ;void dc_pin_init (int number) { char cmd[100 ]; dc_pin_num = number; sprintf (cmd, "echo %d > /sys/class/gpio/export" , number); system(cmd); sprintf (cmd, "echo out > /sys/class/gpio/gpio%d/direction" , number); system(cmd); } void oled_set_dc_pin (int val) { char cmd[100 ]; sprintf (cmd, "echo %d > /sys/class/gpio/gpio%d/value" , val, dc_pin_num); system(cmd); } void spi_write_datas (const unsigned char *buf, int len) { write(fd_spidev, buf, len); } void oled_write_datas (const unsigned char *buf, int len) { oled_set_dc_pin(1 ); spi_write_datas(buf, len); } void oled_write_cmd_data (unsigned char uc_data,unsigned char uc_cmd) { unsigned char uc_read=0 ; if (uc_cmd==0 ) oled_set_dc_pin(0 ); else oled_set_dc_pin(1 ); spi_write_datas(&uc_data, 1 ); } int oled_init (void ) { unsigned char uc_dev_id = 0 ; oled_write_cmd_data(0xae ,OLED_CMD); oled_write_cmd_data(0x00 ,OLED_CMD); oled_write_cmd_data(0x10 ,OLED_CMD); oled_write_cmd_data(0x40 ,OLED_CMD); oled_write_cmd_data(0xB0 ,OLED_CMD); oled_write_cmd_data(0x81 ,OLED_CMD); oled_write_cmd_data(0x66 ,OLED_CMD); oled_write_cmd_data(0xa1 ,OLED_CMD); oled_write_cmd_data(0xa6 ,OLED_CMD); oled_write_cmd_data(0xa8 ,OLED_CMD); oled_write_cmd_data(0x3f ,OLED_CMD); oled_write_cmd_data(0xc8 ,OLED_CMD); oled_write_cmd_data(0xd3 ,OLED_CMD); oled_write_cmd_data(0x00 ,OLED_CMD); oled_write_cmd_data(0xd5 ,OLED_CMD); oled_write_cmd_data(0x80 ,OLED_CMD); oled_write_cmd_data(0xd9 ,OLED_CMD); oled_write_cmd_data(0x1f ,OLED_CMD); oled_write_cmd_data(0xda ,OLED_CMD); oled_write_cmd_data(0x12 ,OLED_CMD); oled_write_cmd_data(0xdb ,OLED_CMD); oled_write_cmd_data(0x30 ,OLED_CMD); oled_write_cmd_data(0x8d ,OLED_CMD); oled_write_cmd_data(0x14 ,OLED_CMD); oled_write_cmd_data(0xaf ,OLED_CMD); return 0 ; } int oled_fill_data (unsigned char fill_Data) { unsigned char x,y; for (x=0 ;x<8 ;x++) { oled_write_cmd_data(0xb0 +x,OLED_CMD); oled_write_cmd_data(0x00 ,OLED_CMD); oled_write_cmd_data(0x10 ,OLED_CMD); for (y=0 ;y<128 ;y++) oled_write_cmd_data(fill_Data,OLED_DATA); } return 0 ; } void OLED_DIsp_Clear (void ) { unsigned char x, y; char buf[128 ]; memset (buf, 0 , 128 ); for (y = 0 ; y < 8 ; y++) { OLED_DIsp_Set_Pos(0 , y); oled_write_datas(buf, 128 ); } } void OLED_DIsp_All (void ) { unsigned char x, y; for (y = 0 ; y < 8 ; y++) { OLED_DIsp_Set_Pos(0 , y); for (x = 0 ; x < 128 ; x++) oled_write_cmd_data(0xff , OLED_DATA); } } void OLED_DIsp_Set_Pos (int x, int y) { oled_write_cmd_data(0xb0 +y,OLED_CMD); oled_write_cmd_data((x&0x0f ),OLED_CMD); oled_write_cmd_data(((x&0xf0 )>>4 )|0x10 ,OLED_CMD); } void OLED_DIsp_Char (int x, int y, unsigned char c) { int i = 0 ; const unsigned char *dots = oled_asc2_8x16[c - ' ' ]; OLED_DIsp_Set_Pos(x, y); oled_write_datas(&dots[0 ], 8 ); OLED_DIsp_Set_Pos(x, y+1 ); oled_write_datas(&dots[8 ], 8 ); } void OLED_DIsp_String (int x, int y, char *str) { unsigned char j=0 ; while (str[j]){ OLED_DIsp_Char(x, y, str[j]); x += 8 ; if (x > 127 ){ x = 0 ; y += 2 ; } j++; } } void OLED_DIsp_Test (void ) { int i; OLED_DIsp_String(0 , 0 , "wiki.100ask.net" ); OLED_DIsp_String(0 , 2 , "book.100ask.net" ); OLED_DIsp_String(0 , 4 , "bbs.100ask.net" ); } int main (int argc, char **argv) { int dc_pin; if (argc != 3 ){ printf ("Usage: %s <dev/spidevB.D> <DC_pin_number>\n" , argv[0 ]); return -1 ; } fd_spidev = open(argv[1 ], O_RDWR); if (fd_spidev < 0 ) { printf ("open %s err\n" , argv[1 ]); return -1 ; } dc_pin = strtoul(argv[2 ], NULL , 0 ); dc_pin_init(dc_pin); oled_init(); OLED_DIsp_Clear(); OLED_DIsp_Test(); return 0 ; }
1.3.4.2.1 用户态驱动分析 有了spidev.c万能SPI从设备驱动,就不需要去写spi从设备驱动了,直接用户态去读写spidev即可。
open("/dev/spi%d.%d", O_RDWR);//根据自己外设使用的spi bus和cs片选去设置对外设oled进行初始化D/C(data or cmd )引脚, 利用gpio子系统的命令去设置gpio模式为输出。
利用spi协议发送初始化序列:
spi_write_datas就是操作spidev,write数据到底层spidev,再调用对应的fops中的spidev_write,最终调用spi_sync传输数据。这里是每次传输1byte,把初始化序列利用spi协议写完。
清屏并且测试oled显示字符。
1.3.5 不使用SPI万能驱动oled举例 1.3.5.1 dts描述 1 2 3 4 5 6 7 8 9 10 11 12 13 14 &ecspi1 { pinctrl-names = "default" ; pinctrl-0 = <&pinctrl_ecspi1>; fsl,spi-num-chipselects = <2 >; cs-gpios = <&gpio4 26 GPIO_ACTIVE_LOW>, <&gpio4 24 GPIO_ACTIVE_LOW>; status = "okay" ; oled: oled { compatible = "100ask,oled" ; reg = <0 >; spi-max-frequency = <10000000 >; dc-gpios = <&gpio4 20 GPIO_ACTIVE_HIGH>; }; };
spi1下接了一个spi oled,修改对应dts文件,修改ecspi1节点,添加oled子节点。oled有一个dc引脚,叫做data/cmd引脚,选择是发送数据还是命令。参考spi oled原理。
1.3.5.2 oled_drv.c 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 #include <linux/init.h> #include <linux/module.h> #include <linux/ioctl.h> #include <linux/fs.h> #include <linux/device.h> #include <linux/err.h> #include <linux/list.h> #include <linux/errno.h> #include <linux/mutex.h> #include <linux/slab.h> #include <linux/compat.h> #include <linux/of.h> #include <linux/of_device.h> #include <linux/acpi.h> #include <linux/spi/spi.h> #include <linux/spi/spidev.h> #include <linux/uaccess.h> #include <linux/gpio/consumer.h> #define OLED_IOC_INIT 123 #define OLED_IOC_SET_POS 124 #define OLED_CMD 0 #define OLED_DATA 1 static struct spi_device *oled ;static int major;static struct gpio_desc *dc_gpio ; static void dc_pin_init (void ) { gpiod_direction_output(dc_gpio, 1 ); } static void oled_set_dc_pin (int val) { gpiod_set_value(dc_gpio, val); } static void spi_write_datas (const unsigned char *buf, int len) { spi_write(oled, buf, len); } static void oled_write_cmd_data (unsigned char uc_data,unsigned char uc_cmd) { if (uc_cmd==0 ) oled_set_dc_pin(0 ); else oled_set_dc_pin(1 ); spi_write_datas(&uc_data, 1 ); } static int oled_init (void ) { oled_write_cmd_data(0xae ,OLED_CMD); oled_write_cmd_data(0x00 ,OLED_CMD); oled_write_cmd_data(0x10 ,OLED_CMD); oled_write_cmd_data(0x40 ,OLED_CMD); oled_write_cmd_data(0xB0 ,OLED_CMD); oled_write_cmd_data(0x81 ,OLED_CMD); oled_write_cmd_data(0x66 ,OLED_CMD); oled_write_cmd_data(0xa1 ,OLED_CMD); oled_write_cmd_data(0xa6 ,OLED_CMD); oled_write_cmd_data(0xa8 ,OLED_CMD); oled_write_cmd_data(0x3f ,OLED_CMD); oled_write_cmd_data(0xc8 ,OLED_CMD); oled_write_cmd_data(0xd3 ,OLED_CMD); oled_write_cmd_data(0x00 ,OLED_CMD); oled_write_cmd_data(0xd5 ,OLED_CMD); oled_write_cmd_data(0x80 ,OLED_CMD); oled_write_cmd_data(0xd9 ,OLED_CMD); oled_write_cmd_data(0x1f ,OLED_CMD); oled_write_cmd_data(0xda ,OLED_CMD); oled_write_cmd_data(0x12 ,OLED_CMD); oled_write_cmd_data(0xdb ,OLED_CMD); oled_write_cmd_data(0x30 ,OLED_CMD); oled_write_cmd_data(0x8d ,OLED_CMD); oled_write_cmd_data(0x14 ,OLED_CMD); oled_write_cmd_data(0xaf ,OLED_CMD); return 0 ; } static void OLED_DIsp_Set_Pos (int x, int y) { oled_write_cmd_data(0xb0 +y,OLED_CMD); oled_write_cmd_data((x&0x0f ),OLED_CMD); oled_write_cmd_data(((x&0xf0 )>>4 )|0x10 ,OLED_CMD); } static long spidev_ioctl (struct file *filp, unsigned int cmd, unsigned long arg) { int x, y; switch (cmd) { case OLED_IOC_INIT: { dc_pin_init(); oled_init(); break ; } case OLED_IOC_SET_POS: { x = arg & 0xff ; y = (arg >> 8 ) & 0xff ; OLED_DIsp_Set_Pos(x, y); break ; } } return 0 ; } static ssize_t spidev_write (struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) { char *ker_buf; int err; ker_buf = kmalloc(count, GFP_KERNEL); err = copy_from_user(ker_buf, buf, count); oled_set_dc_pin(1 ); spi_write_datas(ker_buf, count); kfree(ker_buf); return count; } static const struct file_operations spidev_fops = .owner = THIS_MODULE, .write = spidev_write, .unlocked_ioctl = spidev_ioctl, }; static struct class *spidev_class ;static const struct of_device_id spidev_dt_ids [] = { .compatible = "100ask,oled" }, {}, }; static int spidev_probe (struct spi_device *spi) { oled = spi; major = register_chrdev(0 , "100ask_oled" , &spidev_fops); spidev_class = class_create(THIS_MODULE, "100ask_oled" ); device_create(spidev_class, NULL , MKDEV(major, 0 ), NULL , "100ask_oled" ); dc_gpio = gpiod_get(&spi->dev, "dc" , 0 ); return 0 ; } static int spidev_remove (struct spi_device *spi) { gpiod_put(dc_gpio); device_destroy(spidev_class, MKDEV(major, 0 )); class_destroy(spidev_class); unregister_chrdev(major, "cumtchw_oled" ); return 0 ; } static struct spi_driver spidev_spi_driver = .driver = { .name = "cumtchw_spi_oled_drv" , .of_match_table = of_match_ptr(spidev_dt_ids), }, .probe = spidev_probe, .remove = spidev_remove, }; static int __init spidev_init (void ) { int status; status = spi_register_driver(&spidev_spi_driver); if (status < 0 ) { } return status; } static void __exit spidev_exit (void ) { spi_unregister_driver(&spidev_spi_driver); } module_init(spidev_init); module_exit(spidev_exit); MODULE_LICENSE("GPL" );
1.3.5.2.1 驱动分析
调用spi_register_driver注册SPI从设备驱动,probe函数中利用标准字符设备驱动框架编写的驱动,注册字符设备,添加类。
当用户调用open("/dev/100ask_oled")后,就可以调用read,write函数读写oled。
spidev_ioctl提供了2个ioctl命令,用来初始化oled和设置坐标位置。用spi_write_datas写入初始化序列,每次写1byte。
spi_write_datas调用标准的SPI从设备驱动API(spi_write)传输数据。
spi oled初始化完后就可以使用另一个OLED_IOC_SET_POS ioctl命令设置坐标位置。
调用spidev_write写入数据。
1.3.5.3 spi_oled.c应用测试 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 #include <stdio.h> #include <unistd.h> #include <stdlib.h> #include <fcntl.h> #include <string.h> #include <sys/ioctl.h> #include <sys/types.h> #include <sys/stat.h> #include <linux/types.h> #include <linux/spi/spidev.h> #include "font.h" #define OLED_IOC_INIT 123 #define OLED_IOC_SET_POS 124 #define OLED_CMD 0 #define OLED_DATA 1 static int fd_spidev;static int dc_pin_num;void OLED_DIsp_Set_Pos (int x, int y) ; void oled_write_datas (const unsigned char *buf, int len) { write(fd_spidev, buf, len); } void OLED_DIsp_Clear (void ) { unsigned char x, y; char buf[128 ]; memset (buf, 0 , 128 ); for (y = 0 ; y < 8 ; y++) { OLED_DIsp_Set_Pos(0 , y); oled_write_datas(buf, 128 ); } } void OLED_DIsp_All (void ) { unsigned char x, y; char buf[128 ]; memset (buf, 0xff , 128 ); for (y = 0 ; y < 8 ; y++) { OLED_DIsp_Set_Pos(0 , y); oled_write_datas(buf, 128 ); } } void OLED_DIsp_Set_Pos (int x, int y) { ioctl(fd_spidev, OLED_IOC_SET_POS, x | (y << 8 )); } void OLED_DIsp_Char (int x, int y, unsigned char c) { int i = 0 ; const unsigned char *dots = oled_asc2_8x16[c - ' ' ]; OLED_DIsp_Set_Pos(x, y); oled_write_datas(&dots[0 ], 8 ); OLED_DIsp_Set_Pos(x, y+1 ); oled_write_datas(&dots[8 ], 8 ); } void OLED_DIsp_String (int x, int y, char *str) { unsigned char j=0 ; while (str[j]) { OLED_DIsp_Char(x, y, str[j]); x += 8 ; if (x > 127 ) { x = 0 ; y += 2 ; } j++; } } void OLED_DIsp_Test (void ) { int i; OLED_DIsp_String(0 , 0 , "100ask test" ); } int main (int argc, char **argv) { if (argc != 2 ) { printf ("Usage: %s /dev/cumtchw_oled\n" , argv[0 ]); return -1 ; } fd_spidev = open(argv[1 ], O_RDWR); if (fd_spidev < 0 ) { printf ("open %s err\n" , argv[1 ]); return -1 ; } ioctl(fd_spidev, OLED_IOC_INIT); OLED_DIsp_Clear(); OLED_DIsp_Test(); return 0 ; }
2 数据结构 2.1 spi_master/spi_controller 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 struct spi_master { struct device dev ; s16 bus_num; u16 num_chipselect; u16 dma_alignment; u16 mode_bits; u32 min_speed_hz; u32 max_speed_hz; u16 flags; int (*setup)(struct spi_device *spi); int (*transfer)(struct spi_device *spi, struct spi_message *mesg); void (*cleanup)(struct spi_device *spi); int (*transfer_one_message)(struct spi_master *master, int (*transfer_one)(struct spi_master *master, struct spi_device *spi, struct spi_transfer *transfer); ... };
struct spi_master描述一个spi控制器,包扩spi控制器的属性描述信息,spi的一些操作回调函数,如transfer,setup。
2.2 spi_driver 1 2 3 4 5 6 7 struct spi_driver { const struct spi_device_id *id_table ; int (*probe)(struct spi_device *spi); int (*remove)(struct spi_device *spi); void (*shutdown)(struct spi_device *spi); struct device_driver driver ; };
用来描述一个spi从设备驱动。用来和spi从设备匹配。
2.3 spi_device 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 struct spi_device { struct device dev ; struct spi_controller *controller ; struct spi_controller *master ; u32 max_speed_hz; u8 chip_select; #define SPI_CPHA 0x01 #define SPI_CPOL 0x02 #define SPI_MODE_0 (0|0) #define SPI_MODE_1 (0|SPI_CPHA) #define SPI_MODE_2 (SPI_CPOL|0) #define SPI_MODE_3 (SPI_CPOL|SPI_CPHA) #define SPI_CS_HIGH 0x04 #define SPI_LSB_FIRST 0x08 #define SPI_3WIRE 0x10 #define SPI_LOOP 0x20 #define SPI_NO_CS 0x40 #define SPI_READY 0x80 #define SPI_TX_DUAL 0x100 #define SPI_TX_QUAD 0x200 #define SPI_RX_DUAL 0x400 #define SPI_RX_QUAD 0x800 #define SPI_CS_WORD 0x1000 #define SPI_TX_OCTAL 0x2000 #define SPI_RX_OCTAL 0x4000 #define SPI_3WIRE_HIZ 0x8000 int irq; void *controller_state; void *controller_data; char modalias[SPI_NAME_SIZE]; const char *driver_override; int cs_gpio; struct gpio_desc *cs_gpiod ; struct spi_delay word_delay ; };
用来描述一个spi从设备。用来和spi从设备驱动匹配。
2.4 spi_message/spi_transfer 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 struct spi_transfer { const void *tx_buf; void *rx_buf; unsigned len; ... u8 bits_per_word; u16 delay_usecs; u32 speed_hz; ... struct list_head transfer_list ; }; struct spi_message { struct list_head transfers ; ... struct spi_device *spi ; ... void (*complete)(void *context); void *context; ... struct list_head queue ; };
spi_message是发起一次数据传输,里面的transfers构成基本输入输出数据,通过spi_sync函数或spi_async函数发送。