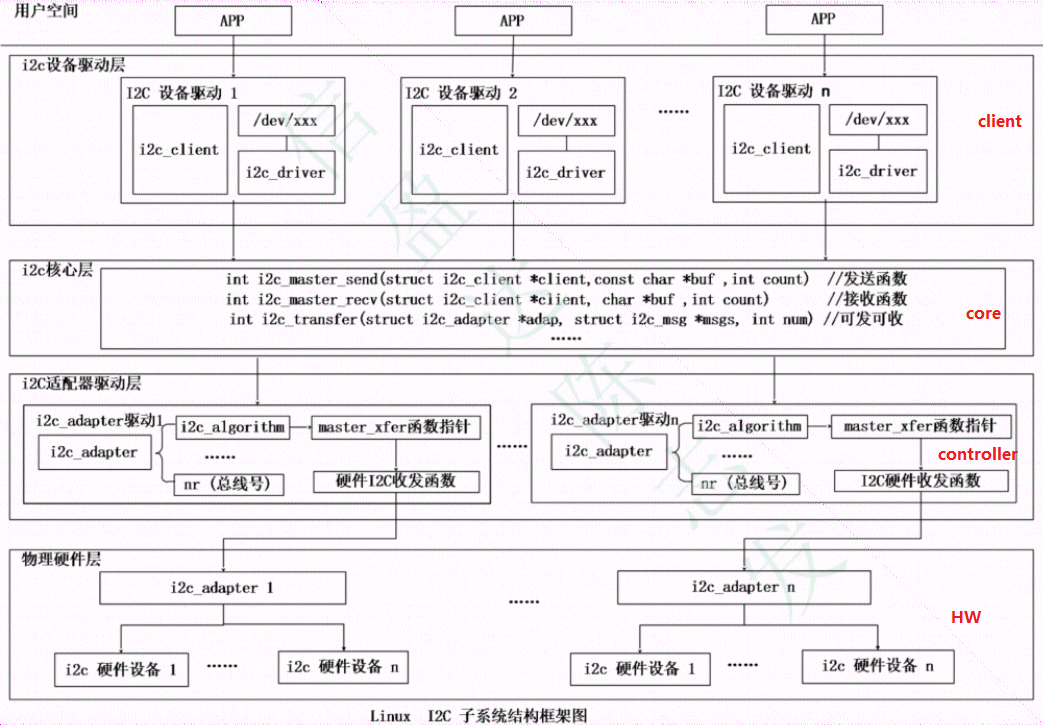
1 Linux I2C 驱动框架
由上到下分为3层结构:
1 2 3 4 5 6 i2c设备驱动层: 作为client使用者使用i2c子系统。提供操作接口给应用层,与应用层交互数据。 I2C核心层:提供transfer send recv函数。把client设备挂载到I2C总线上; 维护i2c driver和i2c client 链表 ,实现i2c_client和i2c_driver匹配。 I2C适配器层:底层SOC I2C控制器驱动,实现i2c时序,实现i2c总线发送和接收数据的方法。
目录结构位于drivers/i2c:
1 2 3 4 robin.lee@WORKSTATION5:/media/robin.lee/zip/A2/linux_5.10/drivers/i2c$ ls algos i2c-core-acpi.c i2c-core-of.c i2c-dev.c i2c-slave-testunit.c Kconfig busses i2c-core-base.c i2c-core-slave.c i2c-mux.c i2c-smbus.c Makefile i2c-boardinfo.c i2c-core.h i2c-core-smbus.c i2c-slave-eeprom.c i2c-stub.c muxes
2 数据结构 2.1 控制器相关 2.1.1 i2c_adapter-控制器 I2C 适配器,也就是 SOC 的 I2C 控制器。i2c_adapter 结构体定义在 include/linux/i2c.h
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 struct i2c_adapter { struct module *owner ; unsigned int class ; const struct i2c_algorithm *algo ; void *algo_data; struct rt_mutex bus_lock ; int timeout; int retries; struct device dev ; int nr; char name[48 ]; struct completion dev_released ; struct mutex userspace_clients_lock ; struct list_head userspace_clients ; struct i2c_bus_recovery_info *bus_recovery_info ; const struct i2c_adapter_quirks *quirks ; };
变量名
解释
class
适配器的类类型,在一些口I2C设备驱动中会检查该成员,以判断设备能否被该适配器操作
algo
指向该造配器通信方法描述结构的指针,就是该适配器具体操作I2C控制器的函数
algo_data
指向通信方法数据的指针,该成员不会被I2C核心层修改,仅供具体的 i2c_algorithm使用
timeout
传输超时时间
retries
传输超时的重试次数
name
适配器名称,该名称可以通过sys/bus/i2c/devices/i2c-x/name (x=0,1,2 … )来访问
nr
总线编号(也是适配器编号),同时对应设备节点/dev/i2c-x (x=0,1,2 …)中的 x
2.1.2 i2c_algorithm-通信方法 对于一个 I2C 适配器,肯定要对外提供读 写 API 函数,设备驱动程序可以使用这些 API 函数来完成读写操作。i2c_algorithm 就是 I2C 适 配器与 IIC 设备进行通信的方法。包括transfer send recv等函数。i2c_algorithm 结构体定义在 include/linux/i2c.h
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 struct i2c_algorithm { int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num); int (*master_xfer_atomic)(struct i2c_adapter *adap, struct i2c_msg *msgs, int num); int (*smbus_xfer)(struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write, u8 command, int size, union i2c_smbus_data *data); int (*smbus_xfer_atomic)(struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write, u8 command, int size, union i2c_smbus_data *data); u32 (*functionality)(struct i2c_adapter *adap); #if IS_ENABLED(CONFIG_I2C_SLAVE) int (*reg_slave)(struct i2c_client *client); int (*unreg_slave)(struct i2c_client *client); #endif };
master_xfer 就是 I2C 适配器的传输函数,可以通过此函数来完成与 IIC 设备之 间的通信。 用于产生I2C访问周期需要的信号, 以i2c_msg为单位(i2c_msg中的成员表明了I2C的传输地址、 方向、 缓冲区、 缓冲区长度等信息) 。
smbus_xfer 是 SMBUS 总线协议的传输函数。
functionality:查看适配的能力。这些功能都是以宏定义的方式表示,定义在include/linux/i2c.h中,以I2C_FUNC开头:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 #define I2C_FUNC_I2C 0x00000001 #define I2C_FUNC_10BIT_ADDR 0x00000002 #define I2C_FUNC_PROTOCOL_MANGLING 0x00000004 /* I2C_M_IGNORE_NAK etc. */ #define I2C_FUNC_SMBUS_PEC 0x00000008 #define I2C_FUNC_NOSTART 0x00000010 /* I2C_M_NOSTART */ #define I2C_FUNC_SLAVE 0x00000020 #define I2C_FUNC_SMBUS_BLOCK_PROC_CALL 0x00008000 /* SMBus 2.0 */ #define I2C_FUNC_SMBUS_QUICK 0x00010000 #define I2C_FUNC_SMBUS_READ_BYTE 0x00020000 #define I2C_FUNC_SMBUS_WRITE_BYTE 0x00040000 #define I2C_FUNC_SMBUS_READ_BYTE_DATA 0x00080000 #define I2C_FUNC_SMBUS_WRITE_BYTE_DATA 0x00100000 #define I2C_FUNC_SMBUS_READ_WORD_DATA 0x00200000 #define I2C_FUNC_SMBUS_WRITE_WORD_DATA 0x00400000 #define I2C_FUNC_SMBUS_PROC_CALL 0x00800000 #define I2C_FUNC_SMBUS_READ_BLOCK_DATA 0x01000000 #define I2C_FUNC_SMBUS_WRITE_BLOCK_DATA 0x02000000 #define I2C_FUNC_SMBUS_READ_I2C_BLOCK 0x04000000 /* I2C-like block xfer */ #define I2C_FUNC_SMBUS_WRITE_I2C_BLOCK 0x08000000 /* w/ 1-byte reg. addr. */ #define I2C_FUNC_SMBUS_HOST_NOTIFY 0x10000000 #define I2C_FUNC_SMBUS_BYTE (I2C_FUNC_SMBUS_READ_BYTE | \ I2C_FUNC_SMBUS_WRITE_BYTE) #define I2C_FUNC_SMBUS_BYTE_DATA (I2C_FUNC_SMBUS_READ_BYTE_DATA | \ I2C_FUNC_SMBUS_WRITE_BYTE_DATA) #define I2C_FUNC_SMBUS_WORD_DATA (I2C_FUNC_SMBUS_READ_WORD_DATA | \ I2C_FUNC_SMBUS_WRITE_WORD_DATA) #define I2C_FUNC_SMBUS_BLOCK_DATA (I2C_FUNC_SMBUS_READ_BLOCK_DATA | \ I2C_FUNC_SMBUS_WRITE_BLOCK_DATA) #define I2C_FUNC_SMBUS_I2C_BLOCK (I2C_FUNC_SMBUS_READ_I2C_BLOCK | \ I2C_FUNC_SMBUS_WRITE_I2C_BLOCK)
2.2 客户端相关 i2c 设备(client使用者)驱动要使用i2c_driver 和i2c_client数据结构并填充i2c_driver中的成员函数。
2.2.1 i2c_driver-I从设备驱动 代表一个i2c使用者设备驱动。结构体定义在 include/linux/i2c.h
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 struct i2c_driver { unsigned int class ; int (*attach_adapter)(struct i2c_adapter *) __deprecated; int (*probe)(struct i2c_client *, const struct i2c_device_id *); int (*remove)(struct i2c_client *); int (*probe_new)(struct i2c_client *); void (*shutdown)(struct i2c_client *); void (*alert)(struct i2c_client *, enum i2c_alert_protocol protocol, unsigned int data); int (*command)(struct i2c_client *client, unsigned int cmd, void *arg); struct device_driver driver ; const struct i2c_device_id *id_table ; int (*detect)(struct i2c_client *, struct i2c_board_info *); const unsigned short *address_list; struct list_head clients ; bool disable_i2c_core_irq_mapping; };
变量名
含义
attach_adapter
依附i2c_adapter的函数指针
detach_adapter
脱离i2c_adapter的函数指针
probe
设备和驱动匹配时调用
driver
在注册i2c_driver对象时,i2c_driver->driver的总线类型被指定为i2c_bus_type
id_table
匹配列表,驱动和设备匹配时会用到
detect
基于设备探测机制实现的 12C 设备驱动:设备探测的回调函数
address_list
设备探测的地址范围
clients
探测到的设备列表
i2c_driver对应于一套驱动方法, 其主要成员函数是probe()、remove()、suspend() 、resume()等。例如:
1 2 3 4 5 6 7 8 9 10 static struct i2c_driver ds1307_driver = .driver = { .name = "rtc-ds1307" , .of_match_table = of_match_ptr(ds1307_of_match), .acpi_match_table = ACPI_PTR(ds1307_acpi_ids), }, .probe = ds1307_probe, .id_table = ds1307_id, };
2.2.2 i2c_client-从设备 代表一个连接到i2c_bus总线上的从设备,结构体定义在 include/linux/i2c.h。描述i2c从设备的i2c相关硬件信息。 一个i2c_driver可以支持多个同类型的i2c_client。i2c_client一般描述再设备树中。
1 2 3 4 5 6 7 8 9 10 struct i2c_client { unsigned short flags; unsigned short addr; char name[I2C_NAME_SIZE]; struct i2c_adapter *adapter ; struct i2c_driver *driver ; int irq; };
2.2.2.1 i2c_board_info 也是描述从设备i2c硬件属性。通常情况下先填充i2c_board_info对象的成员,然后去初始化i2c_client对象。
1 2 3 4 5 6 7 8 9 struct i2c_board_info { char type[I2C_NAME_SIZE]; unsigned short flags; unsigned short addr; void *platform_data; struct dev_archdata *archdata ; struct device_node *of_node ; int irq; };
2.3 i2c_msg-消息 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 struct i2c_msg { __u16 addr; __u16 flags; #define I2C_M_TEN 0x0010 #define I2C_M_RD 0x0001 #define I2C_M_NOSTART 0x4000 #define I2C_M_REV_DIR_ADDR 0x2000 #define I2C_M_IGNORE_NAK 0x1000 #define I2C_M_NO_RD_ACK 0x0800 #define I2C_M_RECV_LEN 0x0400 __u16 len; __u8 *buf; };
I2C的传输地址、 方向、 缓冲区、 缓冲区长度等信息。
3 I2C子系统API 3.1 控制器相关 3.1.1 注册控制器 通过i2c_add_numbered_adapter或 i2c_add_adapter 这两个函数向系统注册设置好的 i2c_adapter。
1 2 int i2c_add_adapter (struct i2c_adapter *adapter) ;int i2c_add_numbered_adapter (struct i2c_adapter *adap) ;
这两个函数的区别在于 i2c_add_adapter 使用动态的总线号,而 i2c_add_numbered_adapter 使用静态总线号。
3.1.2 卸载控制器 1 void i2c_del_adapter (struct i2c_adapter * adap) ;
3.2 客户端设备相关 3.2.1 添加i2c设备驱动 1 2 3 4 int i2c_register_driver (struct module *owner, struct i2c_driver *driver#define i2c_add_driver(driver) \ i2c_register_driver(THIS_MODULE, driver);
3.2.2 删除i2c设备驱动 1 void i2c_del_driver (struct i2c_driver *driver) ;
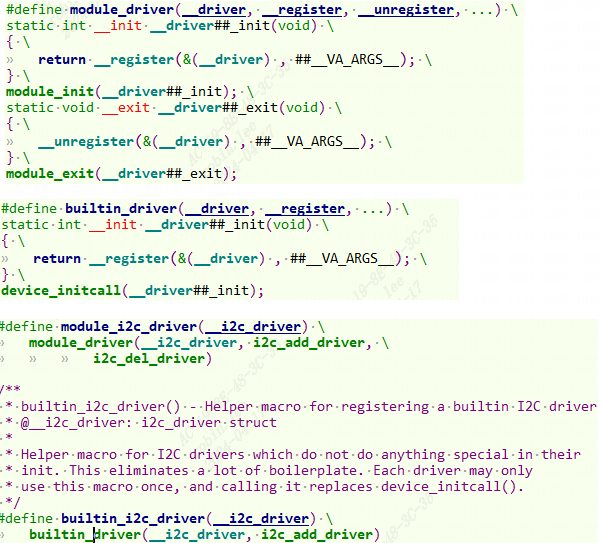
3.2.3 module_driver和builtin_driver使用 在编写从设备驱动时为了方便也可以直接调用module_i2c_driver完成i2c驱动的module_init。或者使用builtin_i2c_driver完成i2c驱动的device_initcall。两者区别一个是编译成内核模块,一个是编译进内核镜像。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 #define module_driver(__driver, __register, __unregister, ...) \ static int __init __driver##_init(void) \ { \ return __register(&(__driver) , ##__VA_ARGS__); \ } \ module_init(__driver##_init); \ static void __exit __driver##_exit(void) \ { \ __unregister(&(__driver) , ##__VA_ARGS__); \ } \ module_exit(__driver##_exit); #define builtin_driver(__driver, __register, ...) \ static int __init __driver##_init(void) \ { \ return __register(&(__driver) , ##__VA_ARGS__); \ } \ device_initcall(__driver##_init);
3.2.4 数据传输 3.2.4.1 i2c_transfer 发送或接收指定字节数的数据。
1 Int i2c_transfer (struct i2c_adapter *adap,struct i2c_msg *msgs, int num) ;
3.2.4.2 i2c_master_recv 接收指定字节的数据。
1 Int i2c_master_recv (const struct i2c_client *client,const char *buf,int count) ;
3.2.4.3 i2c_master_send 发送指定字节的数据。
1 int i2c_master_send (const struct i2c_client *client, const char *buf, int count) ;
4 i2c子系统驱动流程举例 4.1 核心core层注册 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 struct bus_type i2c_bus_type = .name = "i2c" , .match = i2c_device_match, .probe = i2c_device_probe, .remove = i2c_device_remove, .shutdown = i2c_device_shutdown, .pm = &i2c_device_pm_ops, }; EXPORT_SYMBOL_GPL(i2c_bus_type); static const struct i2c_device_id dummy_id [] = { "dummy" , 0 }, { }, }; static struct i2c_driver dummy_driver = .driver.name = "dummy" , .probe = dummy_probe, .remove = dummy_remove, .id_table = dummy_id, }; static int __init i2c_init (void ) { int retval; retval = bus_register(&i2c_bus_type); if (retval) return retval; retval = i2c_add_driver(&dummy_driver); if (retval) goto class_err; return 0 ; class_err: bus_unregister(&i2c_bus_type); return retval; } static void __exit i2c_exit (void ) { i2c_del_driver(&dummy_driver); bus_unregister(&i2c_bus_type); } postcore_initcall(i2c_init); module_exit(i2c_exit);
可以看到内核启动阶段就调用i2c_init 注册了I2C总线和注册了I2C设备驱动dummy_driver;
4.1.1 I2C总线的匹配函数 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 static const struct i2c_device_id *i2c_match_id (const struct i2c_device_id *id, const struct i2c_client *client) { while (id->name[0 ]) { if (strcmp (client->name, id->name) == 0 ) return id; id++; } return NULL ; } static int i2c_device_match (struct device *dev, struct device_driver *drv) { struct i2c_client *client = struct i2c_driver *driver ; if (!client) return 0 ; if (of_driver_match_device(dev, drv)) return 1 ; if (acpi_driver_match_device(dev, drv)) return 1 ; driver = to_i2c_driver(drv); if (driver->id_table) return i2c_match_id(driver->id_table, client) != NULL ; return 0 ; }
向I2C总线注册I2C驱动或者I2C设备时,会逐一将I2C驱动的名字和I2C设备的名字进行匹配,如果匹配上则调用I2C总线的probe方法;
I2C总线的probe方法就是进一步调用i2c_driver的probe方法。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 static int i2c_device_probe (struct device *dev) { struct i2c_client *client = struct i2c_driver *driver ; int status; if (!client) return 0 ; driver = to_i2c_driver(dev->driver); if (!driver->probe || !driver->id_table) return -ENODEV; client->driver = driver; if (!device_can_wakeup(&client->dev)) device_init_wakeup(&client->dev, client->flags & I2C_CLIENT_WAKE); dev_dbg(dev, "probe\n" ); status = driver->probe(client, i2c_match_id(driver->id_table, client)); if (status) { client->driver = NULL ; i2c_set_clientdata(client, NULL ); } return status; }
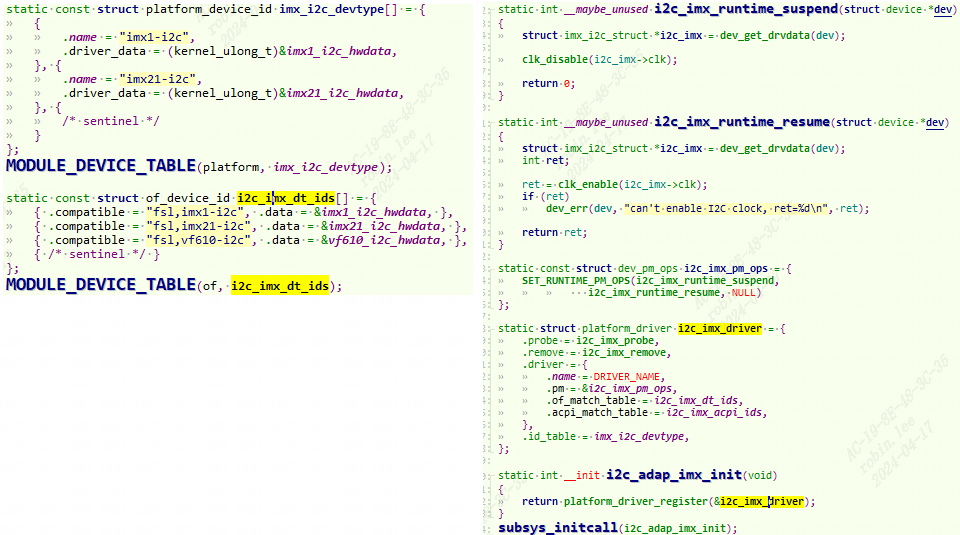
4.2 适配器驱动示例流程 4.2.1 适配器注册 4.2.1.1 i2c控制器描述 以nxp的imx6ull芯片为例,在imx6ull.dtsi文件中找到 I2C1 控制器节点:
1 2 3 4 5 6 7 8 9 i2c1: i2c@021 a0000 { #address-cells = <1>; #size-cells = <0>; compatible = "fsl,imx6ul-i2c" , "fsl,imx21-i2c" ; reg = <0x021a0000 0x4000 >; interrupts = <GIC_SPI 36 IRQ_TYPE_LEVEL_HIGH>; clocks = <&clks IMX6UL_CLK_I2C1>; status = "disabled" ; };
i2c1节点的compatible属性值有两个:fsl,imx6ul-i2c和fsl,imx21-i2c,在 Linux 源码中搜索这两个字符串即可找到对应的驱动文件为drivers/i2c/busses/i2c-imx.c。
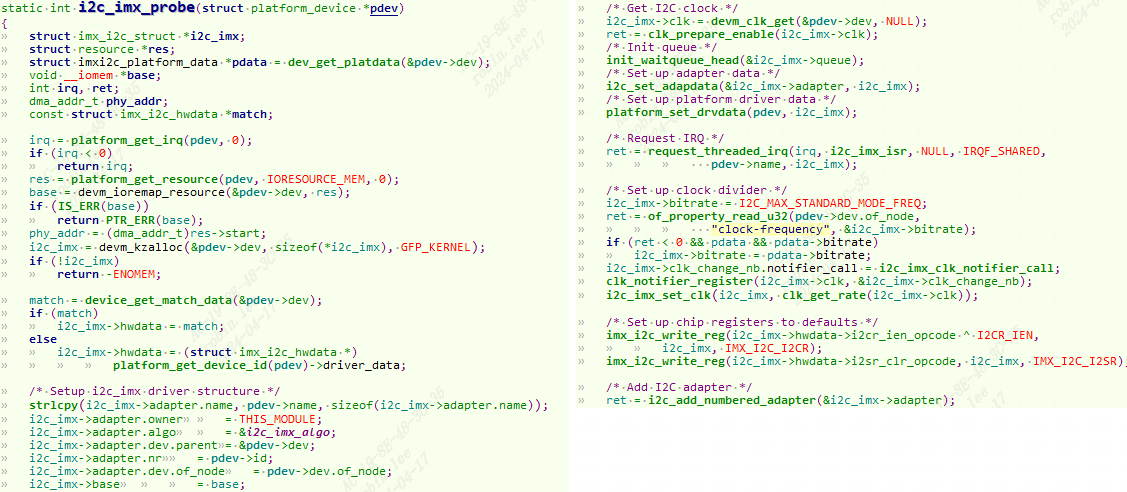
4.2.1.2 i2c控制器驱动probe示例
I2C 适配器驱动也是使用标准的 platform 驱动框架。compatible 属性匹配成功后就会调用probe函数如下:
点击展开代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 static int i2c_imx_probe (struct platform_device *pdev) { struct imx_i2c_struct *i2c_imx ; struct resource *res ; struct imxi2c_platform_data *pdata = void __iomem *base; int irq, ret; dma_addr_t phy_addr; const struct imx_i2c_hwdata *match ; dev_dbg(&pdev->dev, "<%s>\n" , __func__); irq = platform_get_irq(pdev, 0 ); if (irq < 0 ) return irq; res = platform_get_resource(pdev, IORESOURCE_MEM, 0 ); base = devm_ioremap_resource(&pdev->dev, res); if (IS_ERR(base)) return PTR_ERR(base); phy_addr = (dma_addr_t )res->start; i2c_imx = devm_kzalloc(&pdev->dev, sizeof (*i2c_imx), GFP_KERNEL); if (!i2c_imx) return -ENOMEM; match = device_get_match_data(&pdev->dev); if (match) i2c_imx->hwdata = match; else i2c_imx->hwdata = (struct imx_i2c_hwdata *) platform_get_device_id(pdev)->driver_data; strlcpy(i2c_imx->adapter.name, pdev->name, sizeof (i2c_imx->adapter.name)); i2c_imx->adapter.owner = THIS_MODULE; i2c_imx->adapter.algo = &i2c_imx_algo; i2c_imx->adapter.dev.parent = &pdev->dev; i2c_imx->adapter.nr = pdev->id; i2c_imx->adapter.dev.of_node = pdev->dev.of_node; i2c_imx->base = base; ACPI_COMPANION_SET(&i2c_imx->adapter.dev, ACPI_COMPANION(&pdev->dev)); i2c_imx->clk = devm_clk_get(&pdev->dev, NULL ); if (IS_ERR(i2c_imx->clk)) return dev_err_probe(&pdev->dev, PTR_ERR(i2c_imx->clk), "can't get I2C clock\n" ); ret = clk_prepare_enable(i2c_imx->clk); if (ret) { dev_err(&pdev->dev, "can't enable I2C clock, ret=%d\n" , ret); return ret; } init_waitqueue_head(&i2c_imx->queue ); i2c_set_adapdata(&i2c_imx->adapter, i2c_imx); platform_set_drvdata(pdev, i2c_imx); pm_runtime_set_autosuspend_delay(&pdev->dev, I2C_PM_TIMEOUT); pm_runtime_use_autosuspend(&pdev->dev); pm_runtime_set_active(&pdev->dev); pm_runtime_enable(&pdev->dev); ret = pm_runtime_get_sync(&pdev->dev); if (ret < 0 ) goto rpm_disable; ret = request_threaded_irq(irq, i2c_imx_isr, NULL , IRQF_SHARED, pdev->name, i2c_imx); if (ret) { dev_err(&pdev->dev, "can't claim irq %d\n" , irq); goto rpm_disable; } i2c_imx->bitrate = I2C_MAX_STANDARD_MODE_FREQ; ret = of_property_read_u32(pdev->dev.of_node, "clock-frequency" , &i2c_imx->bitrate); if (ret < 0 && pdata && pdata->bitrate) i2c_imx->bitrate = pdata->bitrate; i2c_imx->clk_change_nb.notifier_call = i2c_imx_clk_notifier_call; clk_notifier_register(i2c_imx->clk, &i2c_imx->clk_change_nb); i2c_imx_set_clk(i2c_imx, clk_get_rate(i2c_imx->clk)); imx_i2c_write_reg(i2c_imx->hwdata->i2cr_ien_opcode ^ I2CR_IEN, i2c_imx, IMX_I2C_I2CR); imx_i2c_write_reg(i2c_imx->hwdata->i2sr_clr_opcode, i2c_imx, IMX_I2C_I2SR); ret = i2c_imx_init_recovery_info(i2c_imx, pdev); if (ret == -EPROBE_DEFER) goto clk_notifier_unregister; ret = i2c_add_numbered_adapter(&i2c_imx->adapter); if (ret < 0 ) goto clk_notifier_unregister; pm_runtime_mark_last_busy(&pdev->dev); pm_runtime_put_autosuspend(&pdev->dev); dev_dbg(&i2c_imx->adapter.dev, "claimed irq %d\n" , irq); dev_dbg(&i2c_imx->adapter.dev, "device resources: %pR\n" , res); dev_dbg(&i2c_imx->adapter.dev, "adapter name: \"%s\"\n" , i2c_imx->adapter.name); dev_info(&i2c_imx->adapter.dev, "IMX I2C adapter registered\n" ); i2c_imx_dma_request(i2c_imx, phy_addr); return 0 ; clk_notifier_unregister: clk_notifier_unregister(i2c_imx->clk, &i2c_imx->clk_change_nb); free_irq(irq, i2c_imx); rpm_disable: pm_runtime_put_noidle(&pdev->dev); pm_runtime_disable(&pdev->dev); pm_runtime_set_suspended(&pdev->dev); pm_runtime_dont_use_autosuspend(&pdev->dev); clk_disable_unprepare(i2c_imx->clk); return ret; }
platform_get_irq 函数获取中断号。
platform_get_resource 函数从设备树中获取 I2C1 控制器寄存器物理基 地址,也就是 0X021A0000。使用 devm_ioremap_resource 函数对其进 行内存映射,得到可以在 Linux 内核中使用的虚拟地址。
使用 imx_i2c_struct 结构体来表示 I.MX 系列 SOC 的 I2C 控制器,这里使 用 devm_kzalloc 函数来申请内存。
初始化i2c_adapter。设置i2c_adapter 的algo成员变量为i2c_imx_algo, 也就是设置 i2c_algorithm。
开启i2c时钟。
注册 I2C 控制器中断,中断服务函数为 i2c_imx_isr。
设置 I2C 频率默认为 IMX_I2C_BIT_RATE=100KHz,如果设备树节点设 置了“clock-frequency”属性的话 I2C 频率就使用 clock-frequency 属性值。
设置 I2C1 控制的 I2CR 和 I2SR 寄存器。
调用 i2c_add_numbered_adapter 函数向 Linux 内核注册 i2c_adapter。
4.2.2 适配器操作-i2c_algorithm 1 2 3 4 static struct i2c_algorithm i2c_imx_algo = .master_xfer = i2c_imx_xfer, .functionality = i2c_imx_func, };
4.2.2.1 i2c_imx_func functionality用于返回此I2C适配器支持什么样的通信协议, 在这里 functionality如下:
1 2 3 static u32 i2c_imx_func (struct i2c_adapter *adapter) { return I2C_FUNC_I2C | I2C_FUNC_SMBUS_EMUL | I2C_FUNC_SMBUS_READ_BLOCK_DATA; }
4.2.2.2 i2c_imx_xfer 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 static int i2c_imx_xfer (struct i2c_adapter *adapter, struct i2c_msg *msgs, int num) { struct imx_i2c_struct *i2c_imx = int result; result = pm_runtime_get_sync(i2c_imx->adapter.dev.parent); if (result < 0 ) return result; result = i2c_imx_xfer_common(adapter, msgs, num, false ); pm_runtime_mark_last_busy(i2c_imx->adapter.dev.parent); pm_runtime_put_autosuspend(i2c_imx->adapter.dev.parent); return result; } static int i2c_imx_xfer_atomic (struct i2c_adapter *adapter, struct i2c_msg *msgs, int num) { struct imx_i2c_struct *i2c_imx = int result; result = clk_enable(i2c_imx->clk); if (result) return result; result = i2c_imx_xfer_common(adapter, msgs, num, true ); clk_disable(i2c_imx->clk); return result; }
4.2.2.2.1 i2c_imx_xfer_common 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 static int i2c_imx_xfer_common (struct i2c_adapter *adapter, struct i2c_msg *msgs, int num, bool atomic) { unsigned int i, temp; int result; bool is_lastmsg = false ; struct imx_i2c_struct *i2c_imx = dev_dbg(&i2c_imx->adapter.dev, "<%s>\n" , __func__); result = i2c_imx_start(i2c_imx, atomic); if (result) { if (!atomic && i2c_imx->adapter.bus_recovery_info) { i2c_recover_bus(&i2c_imx->adapter); result = i2c_imx_start(i2c_imx, atomic); } } if (result) goto fail0; for (i = 0 ; i < num; i++) { if (i == num - 1 ) is_lastmsg = true ; if (i) { dev_dbg(&i2c_imx->adapter.dev, "<%s> repeated start\n" , __func__); temp = imx_i2c_read_reg(i2c_imx, IMX_I2C_I2CR); temp |= I2CR_RSTA; imx_i2c_write_reg(temp, i2c_imx, IMX_I2C_I2CR); result = i2c_imx_bus_busy(i2c_imx, 1 , atomic); if (result) goto fail0; } dev_dbg(&i2c_imx->adapter.dev, "<%s> transfer message: %d\n" , __func__, i); #ifdef CONFIG_I2C_DEBUG_BUS temp = imx_i2c_read_reg(i2c_imx, IMX_I2C_I2CR); dev_dbg(&i2c_imx->adapter.dev, "<%s> CONTROL: IEN=%d, IIEN=%d, MSTA=%d, MTX=%d, TXAK=%d, RSTA=%d\n" , __func__, (temp & I2CR_IEN ? 1 : 0 ), (temp & I2CR_IIEN ? 1 : 0 ), (temp & I2CR_MSTA ? 1 : 0 ), (temp & I2CR_MTX ? 1 : 0 ), (temp & I2CR_TXAK ? 1 : 0 ), (temp & I2CR_RSTA ? 1 : 0 )); temp = imx_i2c_read_reg(i2c_imx, IMX_I2C_I2SR); dev_dbg(&i2c_imx->adapter.dev, "<%s> STATUS: ICF=%d, IAAS=%d, IBB=%d, IAL=%d, SRW=%d, IIF=%d, RXAK=%d\n" , __func__, (temp & I2SR_ICF ? 1 : 0 ), (temp & I2SR_IAAS ? 1 : 0 ), (temp & I2SR_IBB ? 1 : 0 ), (temp & I2SR_IAL ? 1 : 0 ), (temp & I2SR_SRW ? 1 : 0 ), (temp & I2SR_IIF ? 1 : 0 ), (temp & I2SR_RXAK ? 1 : 0 )); #endif if (msgs[i].flags & I2C_M_RD) { result = i2c_imx_read(i2c_imx, &msgs[i], is_lastmsg, atomic); } else { if (!atomic && i2c_imx->dma && msgs[i].len >= DMA_THRESHOLD) result = i2c_imx_dma_write(i2c_imx, &msgs[i]); else result = i2c_imx_write(i2c_imx, &msgs[i], atomic); } if (result) goto fail0; } fail0: i2c_imx_stop(i2c_imx, atomic); dev_dbg(&i2c_imx->adapter.dev, "<%s> exit with: %s: %d\n" , __func__, (result < 0 ) ? "error" : "success msg" , (result < 0 ) ? result : num); return (result < 0 ) ? result : num; }
调用i2c_imx_start函数开启 I2C 通信。
读数据的话就调用 i2c_imx_read 函数。
向 I2C 设备写数据,如果要用 DMA 的话就使用 i2c_imx_dma_write 函数来 完成写数据。如果不使用 DMA 的话就使用 i2c_imx_write 函数完成写数据。
I2C 通信完成以后调用i2c_imx_stop函数停止 I2C 通信。
i2c_imx_start、i2c_imx_read、i2c_imx_write 和 i2c_imx_stop 这些函数就是 I2C 寄存器的具体操作函数,按照i2c协议 。
4.3 从设备驱动示例流程 4.3.1 i2c从设备描述 4.3.1.1 不使用dts时描述 在未使用设备树的时候需要在 BSP 里面使用i2c_board_info结构体来描 述一个具体的 I2C 设备。
举个例子,arch/arm/mach-imx/mach-mx27_3ds.c, OV2640 摄像头使用的 I2C 设备信息描述如下:
1 2 3 static struct i2c_board_info mx27_3ds_i2c_camera = I2C_BOARD_INFO("ov2640" , 0x30 ), };
4.3.1.2 使用dts描述 比如NXP 官方的 EVK 开发 板在 I2C1 上接了 mag3110 这个磁力计芯片,因此必须在 i2c1 节点下创建 mag3110 子节点,然 后在这个子节点内描述 mag3110 这个i2c外设的相关信息。打开 imx6ull-14x14-evk.dts:
1 2 3 4 5 6 7 8 9 10 11 12 13 &i2c1 { clock-frequency = <100000 >; pinctrl-names = "default" ; pinctrl-0 = <&pinctrl_i2c1>; status = "okay" ; mag3110@0 e { compatible = "fsl,mag3110" ; reg = <0x0e >; position = <2 >; }; .... };
重点 是 compatible 属性和 reg 属性的设置,一个用于匹配驱动,一个用于设置器件地址。
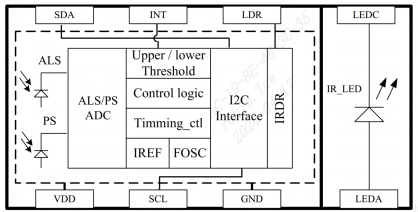
4.3.2 从设备驱动代码示例 4.3.2.1 AP3216C环境传感器 AP3216C是一个三合一环境传感器,包含环境光强度(ALS)、接近距离(PS)和红外线强度(IR)这 三个环境参数检测。接开发板子的i2c1。因此用这个外设作为i2c从设备来举例。
AP3216C 的特点 如下:
1 2 3 4 5 6 7 1. I2C 接口,快速模式下波特率可以到 400Kbit/S 2. 多种工作模式选择:ALS、PS+IR、ALS+PS+IR、PD 等等。 3. 内建温度补偿电路。 4. 宽工作温度范围(-30°C ~ +80°C)。 5. 超小封装,4.1mm x 2.4mm x 1.35mm 6. 环境光传感器具有 16 位分辨率。 7. 接近传感器和红外传感器具有 10 位分辨率
AP3216C 常被用于手机、平板、导航设备等,其内置的接近传感器可以用于检测是否有物体接近,比如手机上用来检测耳朵是否接触听筒,如果检测到的话就表示正在打电话,手机就 会关闭手机屏幕以省电。也可以使用环境光传感器检测光照强度,可以实现自动背光亮度调节。
4.3.2.2 dts设置 打开 imx6ull-alientek-emmc.dts:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 pinctrl_i2c1: i2c1grp { fsl,pins = < MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x4001b8b0 MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x4001b8b0 >; }; &i2c1 { clock-frequency = <100000 >; pinctrl-names = "default" ; pinctrl-0 = <&pinctrl_i2c1>; status = "okay" ; mag3110@0 e { compatible = "fsl,mag3110" ; reg = <0x0e >; position = <2 >; }; };
i2c1使用pinctrl子系统配置了iomux属性。pinctrl_i2c1 就是 I2C1 的 IO 节点,这里将 UART4_TXD 和 UART4_RXD 这两个 IO 分别 复用为 I2C1_SCL 和 I2C1_SDA,电气属性都设置为 0x4001b8b0。
默认i2c1 节点下并不是对应 ap3216c 从设备,而是mag3110。修改dts如下:
1 2 3 4 5 6 7 8 9 10 11 &i2c1 { clock-frequency = <100000 >; pinctrl-names = "default" ; pinctrl-0 = <&pinctrl_i2c1>; status = "okay" ; ap3216c@1 e { compatible = "alientek,ap3216c" ; reg = <0x1e >; }; };
ap3216c 子节点,@后面的“1e”是 ap3216c 的器件地址。
reg 属性也是设置 ap3216c 器件地址的,因此 reg 设置为 0x1e。
修改编译启动linux,可以看到/sys/bus/i2c/devices 目录下存放着所有 I2C 设备,如果设备树修改正确的话,会在 /sys/bus/i2c/devices 目录下看到一个名为“0-001e”的子目录:
“0-001e”就是 ap3216c 的设备目录,“1e”就是 ap3216c 器件地址。进入 0-001e 目录,可以看到“name”文件,name 问价就保存着此设备名字,在这里就是“ap3216c”。
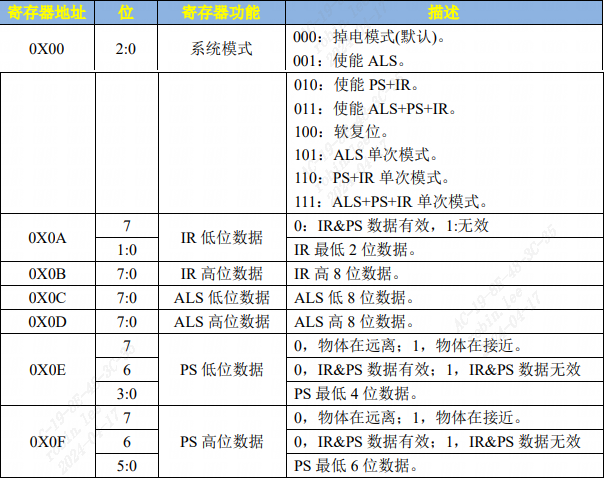
4.3.2.3 AP3216C 驱动示例 ap3216creg.h定义AP3216C 的寄存器:
1 2 3 4 5 6 7 8 9 10 11 12 13 #ifndef AP3216C_H #define AP3216C_H #define AP3216C_ADDR 0X1E #define AP3216C_SYSTEMCONG 0x00 #define AP3216C_INTSTATUS 0X01 #define AP3216C_INTCLEAR 0X02 #define AP3216C_IRDATALOW 0x0A #define AP3216C_IRDATAHIGH 0x0B #define AP3216C_ALSDATALOW 0x0C #define AP3216C_ALSDATAHIGH 0X0D #define AP3216C_PSDATALOW 0X0E #define AP3216C_PSDATAHIGH 0X0F #endif
ap3216c.c:
点击展开代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 #include <linux/types.h> #include <linux/kernel.h> #include <linux/delay.h> #include <linux/ide.h> #include <linux/init.h> #include <linux/module.h> #include <linux/errno.h> #include <linux/gpio.h> #include <linux/cdev.h> #include <linux/device.h> #include <linux/of_gpio.h> #include <linux/semaphore.h> #include <linux/timer.h> #include <linux/i2c.h> #include <asm/mach/map.h> #include <asm/uaccess.h> #include <asm/io.h> #include "ap3216creg.h" #define AP3216C_CNT 1 #define AP3216C_NAME "ap3216c" struct ap3216c_dev { dev_t devid; struct cdev cdev ; struct class *class ; struct device *device ; struct device_node *nd ; int major; void *private_data; unsigned short ir, als, ps; }; static struct ap3216c_dev ap3216cdev ;static int ap3216c_read_regs (struct ap3216c_dev *dev, u8 reg, void *val, int len) { int ret; struct i2c_msg msg [2]; struct i2c_client *client =struct i2c_client *)dev->private_data; msg[0 ].addr = client->addr; msg[0 ].flags = 0 ; msg[0 ].buf = ® msg[0 ].len = 1 ; msg[1 ].addr = client->addr; msg[1 ].flags = I2C_M_RD; msg[1 ].buf = val; msg[1 ].len = len; ret = i2c_transfer(client->adapter, msg, 2 ); if (ret == 2 ) { ret = 0 ; } else { printk("i2c rd failed=%d reg=%06x len=%d\n" ,ret, reg, len); ret = -EREMOTEIO; } return ret; } static s32 ap3216c_write_regs (struct ap3216c_dev *dev, u8 reg, u8 *buf, u8 len) { u8 b[256 ]; struct i2c_msg msg ; struct i2c_client *client =struct i2c_client *)dev->private_data; b[0 ] = reg; memcpy (&b[1 ],buf,len); msg.addr = client->addr; msg.flags = 0 ; msg.buf = b; msg.len = len + 1 ; return i2c_transfer(client->adapter, &msg, 1 ); } static unsigned char ap3216c_read_reg (struct ap3216c_dev *dev, u8 reg) { u8 data = 0 ; ap3216c_read_regs(dev, reg, &data, 1 ); return data; #if 0 struct i2c_client *client =struct i2c_client *)dev->private_data; return i2c_smbus_read_byte_data(client, reg); #endif } static void ap3216c_write_reg (struct ap3216c_dev *dev, u8 reg, u8 data) { u8 buf = 0 ; buf = data; ap3216c_write_regs(dev, reg, &buf, 1 ); } void ap3216c_readdata (struct ap3216c_dev *dev) { unsigned char i =0 ; unsigned char buf[6 ]; for (i = 0 ; i < 6 ; i++) buf[i] = ap3216c_read_reg(dev, AP3216C_IRDATALOW + i); if (buf[0 ] & 0X80 ) dev->ir = 0 ; else dev->ir = ((unsigned short )buf[1 ] << 2 ) | (buf[0 ] & 0X03 ); dev->als = ((unsigned short )buf[3 ] << 8 ) | buf[2 ]; if (buf[4 ] & 0x40 ) dev->ps = 0 ; else dev->ps = ((unsigned short )(buf[5 ] & 0X3F ) << 4 ) | (buf[4 ] & 0X0F ); } static int ap3216c_open (struct inode *inode, struct file *filp) { filp->private_data = &ap3216cdev; ap3216c_write_reg(&ap3216cdev, AP3216C_SYSTEMCONG, 0x04 ); mdelay(50 ); ap3216c_write_reg(&ap3216cdev, AP3216C_SYSTEMCONG, 0X03 ); return 0 ; } static ssize_t ap3216c_read (struct file *filp, char __user *buf, size_t cnt, loff_t *off) { short data[3 ]; long err = 0 ; struct ap3216c_dev *dev =struct ap3216c_dev *)filp->private_data; ap3216c_readdata(dev); data[0 ] = dev->ir; data[1 ] = dev->als; data[2 ] = dev->ps; err = copy_to_user(buf, data, sizeof (data)); return 0 ; } static int ap3216c_release (struct inode *inode, struct file *filp) { return 0 ; } static const struct file_operations ap3216c_ops = .owner = THIS_MODULE, .open = ap3216c_open, .read = ap3216c_read, .release = ap3216c_release, }; static int ap3216c_probe (struct i2c_client *client, const struct i2c_device_id *id) { if (ap3216cdev.major) { ap3216cdev.devid = MKDEV(ap3216cdev.major, 0 ); register_chrdev_region(ap3216cdev.devid, AP3216C_CNT, AP3216C_NAME); } else { alloc_chrdev_region(&ap3216cdev.devid, 0 , AP3216C_CNT, AP3216C_NAME); ap3216cdev.major = MAJOR(ap3216cdev.devid); } cdev_init(&ap3216cdev.cdev, &ap3216c_ops); cdev_add(&ap3216cdev.cdev, ap3216cdev.devid, AP3216C_CNT); ap3216cdev.class = class_create(THIS_MODULE, AP3216C_NAME); if (IS_ERR(ap3216cdev.class)) { return PTR_ERR(ap3216cdev.class); } ap3216cdev.device = device_create(ap3216cdev.class, NULL , ap3216cdev.devid, NULL , AP3216C_NAME); if (IS_ERR(ap3216cdev.device)) { return PTR_ERR(ap3216cdev.device); } ap3216cdev.private_data = client; return 0 ; } static int ap3216c_remove (struct i2c_client *client) { cdev_del(&ap3216cdev.cdev); unregister_chrdev_region(ap3216cdev.devid, AP3216C_CNT); device_destroy(ap3216cdev.class, ap3216cdev.devid); class_destroy(ap3216cdev.class); return 0 ; } static const struct i2c_device_id ap3216c_id [] = {"alientek,ap3216c" , 0 }, {} }; static const struct of_device_id ap3216c_of_match [] = { .compatible = "alientek,ap3216c" }, { } }; static struct i2c_driver ap3216c_driver = .probe = ap3216c_probe, .remove = ap3216c_remove, .driver = { .owner = THIS_MODULE, .name = "ap3216c" , .of_match_table = ap3216c_of_match, }, .id_table = ap3216c_id, }; #if 0 static int __init ap3216c_init (void ) { int ret = 0 ; ret = i2c_add_driver(&ap3216c_driver); return ret; } static void __exit ap3216c_exit (void ) { i2c_del_driver(&ap3216c_driver); } module_init(ap3216c_init); module_exit(ap3216c_exit); #else module_i2c_driver(ap3216c_driver); #endif
典型的i2c驱动框架编写的从设备驱动示例,i2c_add_driver/i2c_del_driver添加和删除从设备驱动。
ap3216c_of_match中compatible匹配上,执行ap3216c_probe,把从设备ap3216c按照字符设备框架构造驱动。ap3216cdev.private_data = client, private_data 成员变量用于存放 ap3216c 对 应的 i2c_client。ap3216c_open初始化ap3216c。传感器数据获取
1 2 3 4 ap3216c_read ap3216c_readdata ap3216c_read_reg ap3216c_read_regs
ap3216c_write_reg调用ap3216c_write_regs再调用i2c_transfer写入数据到指定地址寄存器。
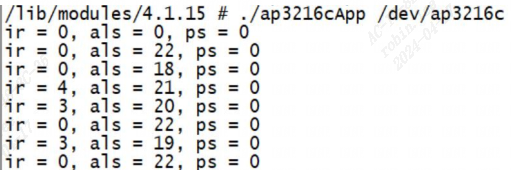
4.3.2.4 AP3216C应用测试 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 #include "stdio.h" #include "unistd.h" #include "sys/types.h" #include "sys/stat.h" #include "sys/ioctl.h" #include "fcntl.h" #include "stdlib.h" #include "string.h" #include <poll.h> #include <sys/select.h> #include <sys/time.h> #include <signal.h> #include <fcntl.h> int main (int argc, char *argv[]) { int fd; char *filename; unsigned short databuf[3 ]; unsigned short ir, als, ps; int ret = 0 ; if (argc != 2 ) { printf ("Error Usage!\r\n" ); return -1 ; } filename = argv[1 ]; fd = open(filename, O_RDWR); if (fd < 0 ) { printf ("can't open file %s\r\n" , filename); return -1 ; } while (1 ) { ret = read(fd, databuf, sizeof (databuf)); if (ret == 0 ) { ir = databuf[0 ]; als = databuf[1 ]; ps = databuf[2 ]; printf ("ir = %d, als = %d, ps = %d\r\n" , ir, als, ps); } usleep(200000 ); } close(fd); return 0 ; }
1 2 执行程序如下: ./a.out /dev/ap3216c
测试 APP 会不断的从 AP3216C 中读取数据,然后输出到终端上: