1 中断在设备树中的表述
1.1 中断控制器
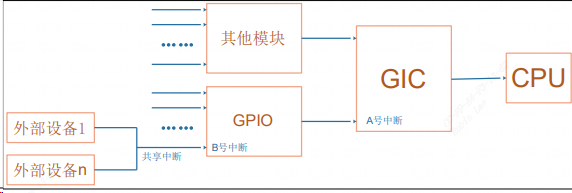
如图:GPIO1 连接到 GIC,GPIO2 连接到 GIC,所以 GPIO1 的父亲是 GIC,GPIO2的父亲是 GIC。假设 GPIO1 有 32 个中断源,但是它把其中的 16 个汇聚起来向 GIC 发出一个中断,把另外 16 个汇聚起来向 GIC 发出另一个中断。这就意味着 GPIO1 会用到 GIC 的两个中断,会涉及 GIC 里的 2 个 hwirq
1.2 设备树中断相关属性
设备树中,中断控制器节点中必须有一个属性:
1.2.1 interrupt-controller
表明它是 “中断控制器”。
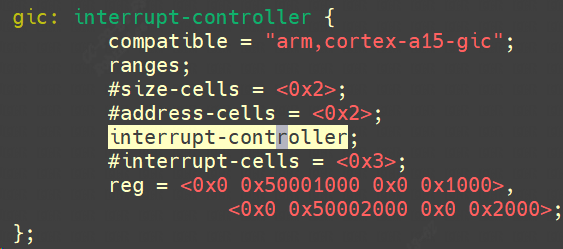
1.2.2 interrupt-cells
⚫ #interrupt-cells=<1>
别的节点要使用这个中断控制器时,只需要一个 cell 来表明使用 “哪一个中断”
1
2
3
4
5
6
| vic: intc@10140000 {
compatible = "arm,versatile-vic";
interrupt-controller;
#interrupt-cells = <1>;
reg = <0x10140000 0x1000>;
};
|
⚫ #interrupt-cells=<2>
别的节点要使用这个中断控制器时,需要一个 cell 来表明使用 “哪一个中断”;还需要另一个 cell 来描述中断,一般是表明触发类型:
第 2 个 cell 的 bits[3:0] 用来表示中断触发类型(trigger type and level flags):
1
2
3
4
| 1 = low-to-high edge triggered,上升沿触发
2 = high-to-low edge triggered,下降沿触发
4 = active high level-sensitive,高电平触发
8 = active low level-sensitive,低电平触发
|
1
2
3
4
5
6
7
8
9
10
| gpio2: gpio@020a0000 {
compatible = "fsl,imx6q-gpio", "fsl,imx35-gpio";
reg = <0x020a0000 0x4000>;
interrupts = <0 68 4>,
<0 69 4>;
gpio-controller;
#gpio-cells = <2>;
interrupt-controller;
#interrupt-cells = <2>;
};
|
1.2.3 interrupt-parent
你要用哪一个中断控制器里的中断?
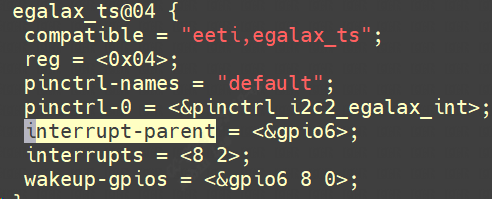
1.2.4 interrupts
你要用哪一个中断?
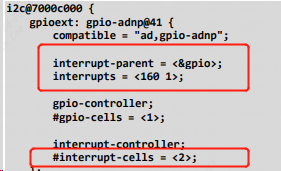
Interrupts 里要用几个 cell,由interrupt-parent对应的中断控制器决定。在中断控制器里有“#interrupt-cells”属性,它指明了要用几个 cell来描述中断。比如下图表示用到gpio中断控制器的160号中断,上升沿触发。
1.3 dts中获取中断
1.3.1 对于 platform_device
1.3.1.1 platform_get_resource
当平台设备和平台驱动match上后,一个节点能被转换为 platform_device,调用platform_get_resource可获取节点资源信息。
1
| extern struct resource *platform_get_resource(struct platform_device *,unsigned int, unsigned int);
|
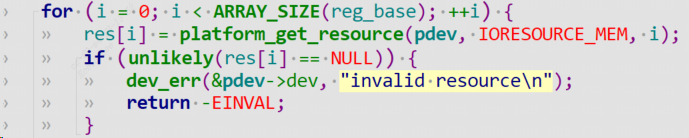
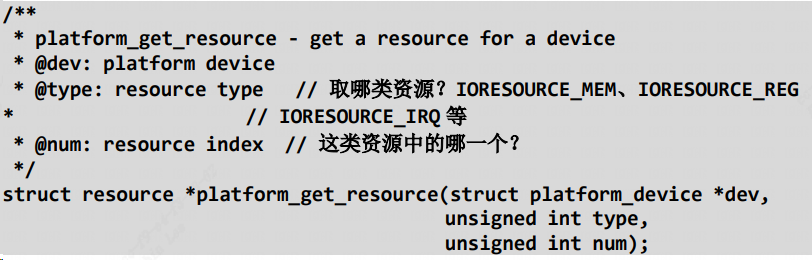
如果需要获取中断信息,传入IORESOURCE_IRQ。
1.3.2 对于 I2C 设备、SPI 设备
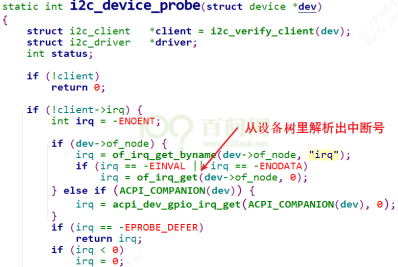
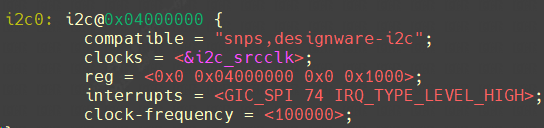
I2C 总线驱动在处理设备树里的 I2C 子节点时,Linux总线会自动处理其中的中断信息。一个 I2C 设备会被转换为一个 i2c_client结构体,中断号会保存在 i2c_client 的 irq 成员里,代码如下(drivers/i2c/i2c-core.c),probe函数里面of_irq_get函数会根据dts中的i2c节点获取中断资源。

GIC_SPI表示中断类型为共享中断。
SPI总线同理,一个 SPI 设备会被转换为一个spi_device结构体,中断号会保存在 spi_device 的 irq 成员里,代码如下(drivers/spi/spi.c):
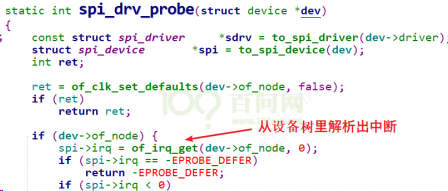
1.3.2.1 调用 of_irq_get 获得中断号
如果我们没用platform device架构写字符设备驱动,也可以直接调用of_irq_get获取。

1.3.3 对于 GPIO
1.3.3.1 gpio_to_irq或 gpiod_to_irq
参考:drivers/input/keyboard/gpio_keys.c, api路径linux_5.10\include\linux\of_gpio.h
可以使用 gpio_to_irq 或 gpiod_to_irq 获得中断号。
1
2
3
4
| button->gpio = of_get_gpio_flags(pp, 0, &flags);
bdata->gpiod = gpio_to_desc(button->gpio);
irq = gpiod_to_irq(bdata->gpiod);
|
2 编写一个按键中断
2.1 按键dts配置
linux内核自带的input sub system本身就包含了gpio按键驱动,驱动程序 drivers/input/keyboard/gpio_keys.c 就可以,然后你需要做
的只是修改设备树指定引脚及键值。
为了简化我们直接写一个例子:强化熟悉对gpio中断的使用。
我们确定好用gpio5_1, gpio4_14这2个按键来展开实验:定义好dts节点,这里定义gpio_keys_100ask,内核有函数自动把gpio num转成irq。在其他地方dts中(imx6ull.dts中)会描述好gpio5,gpio4节点信息,里面会有
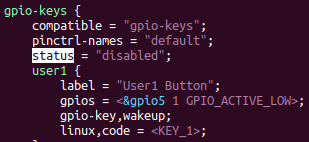
因此,这里表示引用gpio5的第0个引脚,gpio4的第14个引脚,节点如下,需要把原来的节点gpio-keys disable掉,添加下面的gpio_keys_100ask。进入内核目录 make dtbs
1
2
3
4
5
6
7
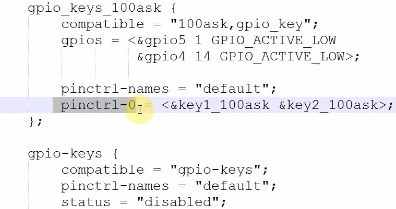
| gpio_keys_100ask {
compatible = "100ask,gpio_key";
gpios = <&gpio5 1 GPIO_ACTIVE_HIGH
&gpio4 14 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&key1_pinctrl &key2_pinctrl>;
};
|
设备树中并没有对这2个引脚进行pinctrl配置,也就是iomux配置,那为什么这2个引脚还能工作,是因为这个个引脚默认就是gpio状态,不用进行iomux切换。
为了保险起见,按照标准流程还需要对其添加pinctrl信息。
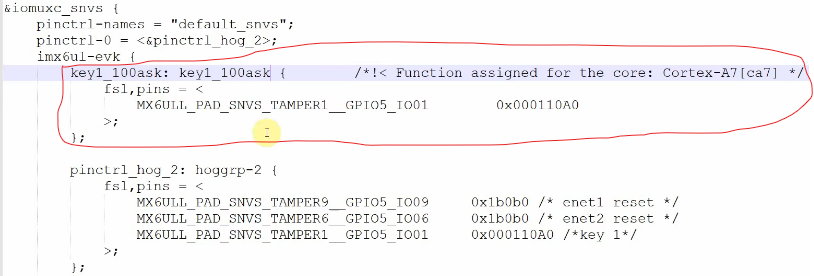
2.1.1 添加2个按键的iomux配置
imx6ull工具有制作好pinctrl如何配置:


填入到对应的子节点下面:gpio5的iomux配置放在iomuxc_snvs节点下,gpio4的配置放在iomuxc下。

2.1.2 定义按键dts描述
再到定义的gpio_keys_100ask引用这2个pinctrl信息 key1_100ask和 key2_100ask。这里pinctrl只有一个default状态,pinctrl-0表示该默认状态,因此最终gpio5_1, gpio4_14就被iomux成了gpio状态。
2.2 驱动代码
驱动代码如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
| #include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
struct gpio_key{
int gpio;
struct gpio_desc *gpiod;
int flag;
int irq;
};
static struct gpio_key *gpio_keys_100ask;
static int major = 0;
static struct class *gpio_key_class;
static int g_key = 0;
static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset) {
int err;
wait_event_interruptible(gpio_key_wait, g_key);
err = copy_to_user(buf, &g_key, 4);
g_key = 0;
return 4;
}
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = gpio_key_drv_read,
};
static irqreturn_t gpio_key_isr(int irq, void *dev_id){
struct gpio_key *gpio_key = dev_id;
int val;
val = gpiod_get_value(gpio_key->gpiod);
printk("key %d %d\n", gpio_key->gpio, val);
g_key = (gpio_key->gpio << 8) | val;
wake_up_interruptible(&gpio_key_wait);
return IRQ_HANDLED;
}
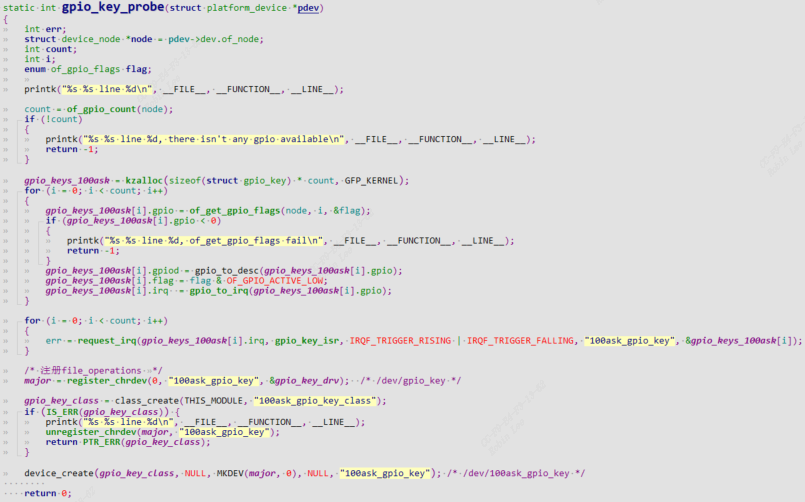
static int gpio_key_probe(struct platform_device *pdev){
int err;
struct device_node *node = pdev->dev.of_node;
int count;
int i;
enum of_gpio_flags flag;
count = of_gpio_count(node);
if (!count)
printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_100ask = kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);
for (i = 0; i < count; i++)
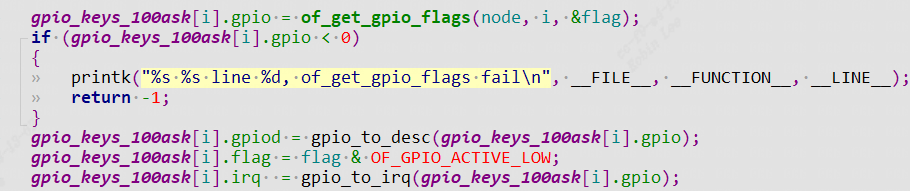
gpio_keys_100ask[i].gpio = of_get_gpio_flags(node, i, &flag);
if (gpio_keys_100ask[i].gpio < 0) {
printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_100ask[i].gpiod = gpio_to_desc(gpio_keys_100ask[i].gpio);
gpio_keys_100ask[i].flag = flag & OF_GPIO_ACTIVE_LOW;
gpio_keys_100ask[i].irq = gpio_to_irq(gpio_keys_100ask[i].gpio);
}
for (i = 0; i < count; i++) {
err = request_irq(gpio_keys_100ask[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING
, "100ask_gpio_key", &gpio_keys_100ask[i]);
}
major = register_chrdev(0, "100ask_gpio_key", &gpio_key_drv);
gpio_key_class = class_create(THIS_MODULE, "100ask_gpio_key_class");
if (IS_ERR(gpio_key_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_gpio_key");
return PTR_ERR(gpio_key_class);
}
device_create(gpio_key_class, NULL, MKDEV(major, 0), NULL, "100ask_gpio_key");
return 0;
}
static int gpio_key_remove(struct platform_device *pdev){
struct device_node *node = pdev->dev.of_node;
int count;
int i;
device_destroy(gpio_key_class, MKDEV(major, 0));
class_destroy(gpio_key_class);
unregister_chrdev(major, "100ask_gpio_key");
count = of_gpio_count(node);
for (i = 0; i < count; i++){
free_irq(gpio_keys_100ask[i].irq, &gpio_keys_100ask[i]);
}
kfree(gpio_keys_100ask);
return 0;
}
static const struct of_device_id ask100_keys[] = {
{ .compatible = "100ask,gpio_key" },
{ },
};
static struct platform_driver gpio_keys_driver = {
.probe = gpio_key_probe,
.remove = gpio_key_remove,
.driver = {
.name = "100ask_gpio_key",
.of_match_table = ask100_keys,
},
};
static int __init gpio_key_init(void){
return platform_driver_register(&gpio_keys_driver);
}
static void __exit gpio_key_exit(void){
platform_driver_unregister(&gpio_keys_driver);
}
module_init(gpio_key_init);
module_exit(gpio_key_exit);
MODULE_LICENSE("GPL");
|
2.2.1 驱动代码分析
定义gpio_key
通过.compatible = "100ask,gpio_key"匹配plateform_device和platform_driver, 当insmod ko时probe函数被调用。
struct device_node *node = pdev->dev.of_node;//可以从platform_device获取到device_node。

of_gpio_count可以根据设备树节点获取到gpio的数量。

of_get_gpio_flags可以根据设备树节点获取到gpio编号和gpio flags

获取gpio描述子和gpio中断号:

注册中断服务程序gpio_key_isr,当按键按下会触发gpio中断,执行gpio_key_isr
中断服务程序就简单的打印按键的电平状态:
1
2
3
4
5
6
7
| static irqreturn_t gpio_key_isr(int irq, void *dev_id){
struct gpio_key *gpio_key = dev_id;
int val;
val = gpiod_get_value(gpio_key->gpiod);
printk("key %d %d\n", gpio_key->gpio, val);
return IRQ_HANDLED;
}
|