1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
| #include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
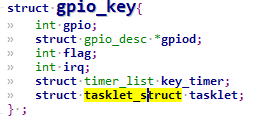
struct gpio_key{
int gpio;
struct gpio_desc *gpiod;
int flag;
int irq;
struct timer_list key_timer;
struct tasklet_struct tasklet;
} ;
static struct gpio_key *gpio_keys_100ask;
static int major = 0;
static struct class *gpio_key_class;
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;
struct fasync_struct *button_fasync;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
static int is_key_buf_empty(void){
return (r == w);
}
static int is_key_buf_full(void){
return (r == NEXT_POS(w));
}
static void put_key(int key){
if (!is_key_buf_full()){
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static int get_key(void){
int key = 0;
if (!is_key_buf_empty()){
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);
static void key_timer_expire(unsigned long data){
struct gpio_key *gpio_key = data;
int val;
int key;
val = gpiod_get_value(gpio_key->gpiod);
printk("key_timer_expire key %d %d\n", gpio_key->gpio, val);
key = (gpio_key->gpio << 8) | val;
put_key(key);
wake_up_interruptible(&gpio_key_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
static void key_tasklet_func(unsigned long data){
struct gpio_key *gpio_key = data;
int val;
int key;
val = gpiod_get_value(gpio_key->gpiod);
printk("key_tasklet_func key %d %d\n", gpio_key->gpio, val);
}
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset){
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_key_wait, !is_key_buf_empty());
key = get_key();
err = copy_to_user(buf, &key, 4);
return 4;
}
static unsigned int gpio_key_drv_poll(struct file *fp, poll_table * wait){
poll_wait(fp, &gpio_key_wait, wait);
return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}
static int gpio_key_drv_fasync(int fd, struct file *file, int on){
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = gpio_key_drv_read,
.poll = gpio_key_drv_poll,
.fasync = gpio_key_drv_fasync,
};
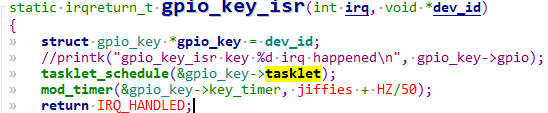
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_key *gpio_key = dev_id;
tasklet_schedule(&gpio_key->tasklet);
mod_timer(&gpio_key->key_timer, jiffies + HZ/50);
return IRQ_HANDLED;
}
static int gpio_key_probe(struct platform_device *pdev){
int err;
struct device_node *node = pdev->dev.of_node;
int count;
int i;
enum of_gpio_flags flag;
count = of_gpio_count(node);
if (!count){
printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
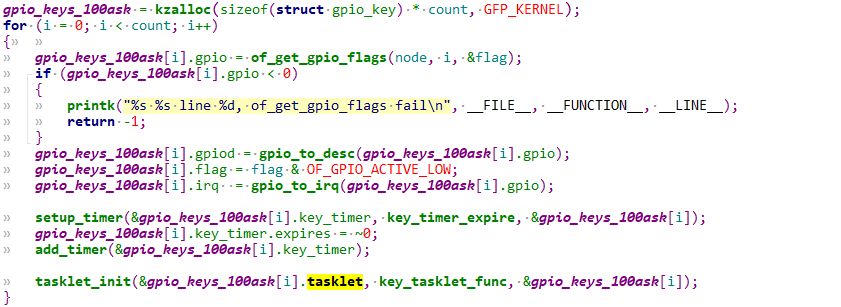
gpio_keys_100ask = kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);
for (i = 0; i < count; i++){
gpio_keys_100ask[i].gpio = of_get_gpio_flags(node, i, &flag);
if (gpio_keys_100ask[i].gpio < 0){
printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_100ask[i].gpiod = gpio_to_desc(gpio_keys_100ask[i].gpio);
gpio_keys_100ask[i].flag = flag & OF_GPIO_ACTIVE_LOW;
gpio_keys_100ask[i].irq = gpio_to_irq(gpio_keys_100ask[i].gpio);
setup_timer(&gpio_keys_100ask[i].key_timer, key_timer_expire, &gpio_keys_100ask[i]);
gpio_keys_100ask[i].key_timer.expires = ~0;
add_timer(&gpio_keys_100ask[i].key_timer);
tasklet_init(&gpio_keys_100ask[i].tasklet, key_tasklet_func, &gpio_keys_100ask[i]);
}
for (i = 0; i < count; i++){
err = request_irq(gpio_keys_100ask[i].irq, gpio_key_isr
, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "100ask_gpio_key", &gpio_keys_100ask[i]);
}
major = register_chrdev(0, "100ask_gpio_key", &gpio_key_drv);
gpio_key_class = class_create(THIS_MODULE, "100ask_gpio_key_class");
if (IS_ERR(gpio_key_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_gpio_key");
return PTR_ERR(gpio_key_class);
}
device_create(gpio_key_class, NULL, MKDEV(major, 0), NULL, "100ask_gpio_key");
return 0;
}
static int gpio_key_remove(struct platform_device *pdev){
struct device_node *node = pdev->dev.of_node;
int count;
int i;
device_destroy(gpio_key_class, MKDEV(major, 0));
class_destroy(gpio_key_class);
unregister_chrdev(major, "100ask_gpio_key");
count = of_gpio_count(node);
for (i = 0; i < count; i++){
free_irq(gpio_keys_100ask[i].irq, &gpio_keys_100ask[i]);
del_timer(&gpio_keys_100ask[i].key_timer);
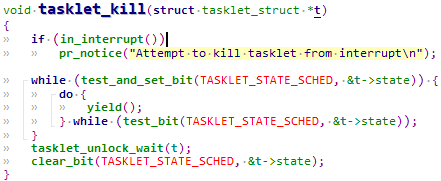
tasklet_kill(&gpio_keys_100ask[i].tasklet);
}
kfree(gpio_keys_100ask);
return 0;
}
static const struct of_device_id ask100_keys[] = {
{ .compatible = "100ask,gpio_key" },
{ },
};
static struct platform_driver gpio_keys_driver = {
.probe = gpio_key_probe,
.remove = gpio_key_remove,
.driver = {
.name = "100ask_gpio_key",
.of_match_table = ask100_keys,
},
};
static int __init gpio_key_init(void){
return platform_driver_register(&gpio_keys_driver);
}
static void __exit gpio_key_exit(void){
platform_driver_unregister(&gpio_keys_driver);
}
module_init(gpio_key_init);
module_exit(gpio_key_exit);
MODULE_LICENSE("GPL");
|