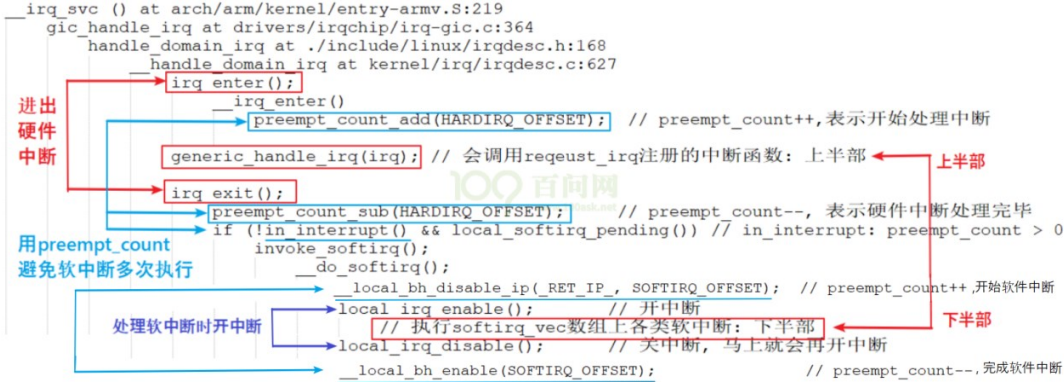
1 并发场景#
Linux 系统并发产生的原因很复杂,总结一下有下面几个主要原 因:
- 多线程并发访问,Linux 是多任务(线程)的系统,所以多线程访问是最基本的原因。
- 抢占式并发访问,从 2.6 版本内核开始,Linux 内核支持抢占,也就是说调度程序可以 在任意时刻抢占正在运行的线程,从而运行其他的线程。
- 中断程序并发访问,这个无需多说,学过 STM32 的同学应该知道,硬件中断的权利可 是很大的。
- SMP(多核)核间并发访问,现在 ARM 架构的多核 SOC 很常见,多核 CPU 存在核间并 发访问。
2 并发解决方案#
2.1 内存屏障#
2.1.1 编译器指令重排(Compiler Instruction Reordering)#
1 | int a, b; |
1 | <foo>: |
我们把编译优化打开到-O2,再次反汇编:
1 | <foo>: |
可以看到编译器 ”自作聪明“, b被提前赋值了。因此要使用内存屏障。
2.1.2 内存屏障API#
1 | barrier(); |
2.1.2.1 barrier#
前面用-O2选项顺序会被错误的排列。加入barrier();//插入内存屏障,再次反汇编可以看到OK符合我们的逻辑了。
1 | int a, b; |
2.1.2.2 cpu_relax#
1 | int run = 1; |
run 是个全局变量,foo() 在一个进程中执行,一直循环。我们期望的结果是 foo() 一直等到其他进程修改 run 的值为 0 才退出循环。反汇编看看:
1 | 0000000000000748 <foo>: |
但实际上编译器帮我们优化成了等效下面的样子:这样永远也不会退出。
1 | int run = 1; |
因此加上内存屏障如下:
1 | int run = 1; |
2.1.2.3 READ_ONCE()#
也可用这种方式作为内存屏障。
1 | int run = 1; |
2.2 原子操作#
2.2.0 临界区的原子操作引入#
所谓的临界区就是共享数据段,如全局变量,对于临界区必须保证一次只有一个线程访问,也就是要保证临 界区是原子访问的。我们都知道,原子是化学反应不可再分的基本微粒,这里的原子访问就表示这一个访问是一个步骤,不能再进行拆分。
示例1:
a=3;
假设变量 a 的地址为 0X3000000,“a=3”这一行 C 语言可能会被编译为如下所示的汇编代码:
1 | ldr r0, =0X30000000 /* 变量 a 地址 */ |
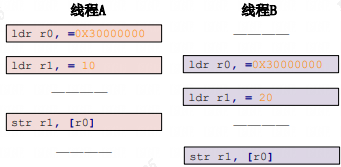
如果多线程同时执行这条语句。我们期望的执行顺序:
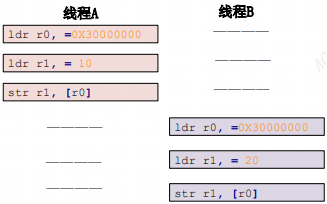
实际执行顺序可能是:
线程 A 最终将变量 a 设置为了 20,而并不是要求的 10线程 B 没有问题,是期望的a设置成了20,这就是并发竞态。我们希望三条汇编指令一次性执行完,不被打断和拆解,这就是原子操作。
#
2.2.1 整数原子操作API#
1 | typedef struct { |
| 函数 | 描述 |
|---|---|
| ATOMIC_INIT(int i) | 定义原子变量的时候对其初始化。 |
| int atomic_read(atomic_t *v) | 读取 v 的值,并且返回。 |
| void atomic_set(atomic_t *v, int i) | 向 v 写入 i 值。 |
| void atomic_add(int i, atomic_t *v) | 给 v 加上 i 值。 |
| void atomic_sub(int i, atomic_t *v) | 从 v 减去 i 值。 |
| void atomic_inc(atomic_t *v) | 给 v 加 1,也就是自增。 |
| void atomic_dec(atomic_t *v) | 从 v 减 1,也就是自减 |
| int atomic_dec_return(atomic_t *v) | 从 v 减 1,并且返回 v 的值。 |
| int atomic_inc_return(atomic_t *v) | 给 v 加 1,并且返回 v 的值。 |
| atomic_add_return(int i, atomic_t *v) | 给 v 加 i,并且返回 v 的值。 |
| atomic_sub_return(int i, atomic_t *v) | 给 v 减 i,并且返回 v 的值。 |
| int atomic_sub_and_test(int i, atomic_t *v) | 从 v 减 i,如果结果为 0 就返回真,否则返回假 |
| int atomic_dec_and_test(atomic_t *v) | 从 v 减 1,如果结果为 0 就返回真,否则返回假 |
| int atomic_inc_and_test(atomic_t *v) | 给 v 加 1,如果结果为 0 就返回真,否则返回假 |
| int atomic_add_negative(int i, atomic_t *v) | 给 v 加 i,如果结果为负就返回真,否则返回假 |
| atomic_cmpxchg(atomic_t *ptr, int old, int new) | 比较old和原子变量ptr中的值,如果相等,那么就把new值赋给原子变量。返回旧的原子变量ptr中的值 |
例:
1 | static int led_open(struct inode *inode, struct file *filp) |
该例子用来实现一次只能允许一个应用访问 LED 灯,不能多个进程同时操作LED。第一个用户程序进行open,成功此时原子值counter=0,第二个用户程序进行open就会fail, 直到第一个用户程序close, counter会进行加一,此时第二个程序才可以open成功。
2.2.2 位原子操作API#
原 子位操作不像原子整形变量那样有个 atomic_t 的数据结构,原子位操作是直接对内存进行操作:
| 函数 | 描述 |
|---|---|
| void set_bit(int nr, void *p) | 将 p 地址的第 nr 位置 1。 |
| void clear_bit(int nr,void *p) | 将 p 地址的第 nr 位清零。 |
| void change_bit(int nr, void *p) | 将 p 地址的第 nr 位进行翻转。 |
| int test_bit(int nr, void *p) | 获取 p 地址的第 nr 位的值。 |
| int test_and_set_bit(int nr, void *p) | 将 p 地址的第 nr 位置 1,并且返回 nr 位原来的值。 |
| int test_and_clear_bit(int nr, void *p) | 将 p 地址的第 nr 位清零,并且返回 nr 位原来的值。 |
| int test_and_change_bit(int nr, void *p) | 将 p 地址的第 nr 位翻转,并且返回 nr 位原来的值。 |
2.3 自旋锁#
原子操作只能对整形变量或者位进行保护,但是,在实际的使用环境中怎么可能只有整形 变量或位这么简单的临界区。
自旋锁的定义:
对于自旋锁而言,如果自旋锁 正在被线程 A 持有,线程 B 想要获取自旋锁,那么线程 B 就会处于忙循环-旋转-等待状态,线 程 B 不会进入休眠状态或者说去做其他的处理,而是会一直傻傻的在那里“转圈圈”的等待锁 可用。比如现在有个公用电话亭,一次肯定只能进去一个人打电话,现在电话亭里面有人正在 打电话,相当于获得了自旋锁。此时你到了电话亭门口,因为里面有人,所以你不能进去打电 话,相当于没有获取自旋锁,这个时候你肯定是站在原地等待,你可能因为无聊的等待而转圈 圈消遣时光,反正就是哪里也不能去,要一直等到里面的人打完电话出来。终于,里面的人打 完电话出来了,相当于释放了自旋锁,这个时候你就可以使用电话亭打电话了,相当于获取到 了自旋锁。
自旋锁的“自旋”也就是“原地打转”的意思,“原地打转”的目的是为了等待自旋锁可以 用,可以访问共享资源。把自旋锁比作一个变量 a,变量 a=1 的时候表示共享资源可用,当 a=0 的时候表示共享资源不可用。现在线程 A 要访问共享资源,发现 a=0(自旋锁被其他线程持有), 那么线程 A 就会不断的查询 a 的值,直到 a=1。可
缺点:获取自旋锁会原地等待,会浪费处理器时间,降低系统性能,所以自旋锁 的持有时间不能太长。如果临界区比较大,运行时间比较长的话要选择信号量和互斥体。
适用范围:适用于短时期的轻量级加锁。
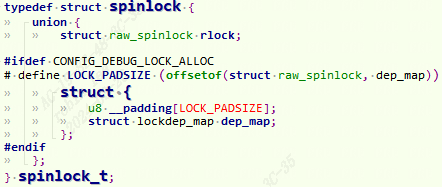
2.3.1 自旋锁API#
| 函数 | 描述 |
|---|---|
| DEFINE_SPINLOCK(spinlock_t lock) | 定义并初始化一个自选变量。 |
| int spin_lock_init(spinlock_t *lock) | 初始化自旋锁。 |
| void spin_lock(spinlock_t *lock) | 获取指定的自旋锁,也叫做加锁。 |
| void spin_unlock(spinlock_t *lock) | 释放指定的自旋锁。 |
| int spin_trylock(spinlock_t *lock) | 尝试获取指定的自旋锁,如果没有获取到就返回 0 |
| int spin_is_locked(spinlock_t *lock) | 检查指定的自旋锁是否被获取,如果没有被获取就返回非 0,否则返回 0。 |
被自旋锁保护的临界区一定不能调用任何能够引起睡眠和阻塞的 API 函数,否则的话会可能会导致死锁现象(不能带锁休眠)。因为自旋锁会禁止抢占,也就说当线程 A 得到锁以后会暂时禁止内核抢占,那既然禁止内核抢占自己又休眠了,粗俗的形容就是“占着茅坑不拉屎”,自己休眠了又没有释放锁就导致死锁。
2.3.1.1 自旋锁和中断相关#
中断里面访问临界资源,也是可以使用自旋锁的,但是在获取锁之前一定要先禁止本地中断。
| 函数 | 描述 |
|---|---|
| void spin_lock_irq(spinlock_t *lock) | 禁止本地中断,并获取自旋锁。 |
| void spin_unlock_irq(spinlock_t *lock) | 激活本地中断,并释放自旋锁。 |
| void spin_lock_irqsave(spinlock_t *lock,unsigned long flags) | 保存中断状态,禁止本地中断,并获取自旋锁。 |
| void spin_unlock_irqrestore(spinlock_t*lock, unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放自旋锁 |
如下图就是没有禁止本地中断导致死锁的例子:
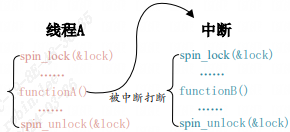
线程 A 先运行,并且获取到了 lock 这个锁,当线程 A 运行 functionA 函 数的时候中断发生了,中断抢走了 CPU 使用权。右边的中断服务函数也要获取 lock 这个锁, 但是这个锁被线程 A 占有着,中断就会一直自旋,等待锁有效。但是在中断服务函数执行完之前,线程 A 是不可能执行的,线程 A 说“你先放手”,中断说“你先放手”,场面就这么僵持着, 死锁发生!
使用 spin_lock_irq/spin_unlock_irq 的时候需要用户能够确定加锁之前的中断状态,但实际上我们是很难确定某个时刻的中断状态,因此不推荐使用 spin_lock_irq/spin_unlock_irq。建议使用 spin_lock_irqsave/spin_unlock_irqrestore,因为这一组函数会保存中断状态,在释放锁的时候会恢复中断状态。一般在线程中使用 spin_lock_irqsave/ spin_unlock_irqrestore,在中断中使用 spin_lock/spin_unlock,例如下面:
1 | DEFINE_SPINLOCK(lock); |
有人说为什么中断服务程序不去使用spin_lock_irqsave呢? 难道不需要去禁止中断吗?
因为GIC中断总入口已经帮我们做了禁止中断。调用了local_irq_disable(),详见设备驱动-10.中断子系统-1异常中断引入 - fuzidage - 博客园 (cnblogs.com)
如果下半部(BH)也会竞争共享资源,要在下半部里面使用自旋锁:
| 函数 | 描述 |
|---|---|
| void spin_lock_bh(spinlock_t *lock) | 关闭下半部,并获取自旋锁 |
| void spin_unlock_bh(spinlock_t *lock) | 打开下半部,并释放自旋锁 |
2.3.2 读写自旋锁#
读写自旋锁为读和写操作提供了不同的锁,一次只能允许一个写操作,也就是只能一个线程持有写锁,而且不能进行读操作。但是当没有写操作的时候允许一个或多个线程持有读锁, 可以进行并发的读操作。Linux 内核使用 rwlock_t 结构体表示读写锁,结构体定义如下(删除了 条件编译):
1 | typedef struct { |
使用场景:
现在有个学生信息表,此表存放着学生的年龄、家庭住址、班级等信息,此表可以随时被 修改和读取,那么必须要对其进行保护,如果我们现在使用自旋锁对其进行 保护。每次只能一个读操作或者写操作,但是,实际上此表是可以并发读取的。只需要保证在 修改此表的时候没人读取,或者在其他人读取此表的时候没有人修改此表就行了。也就是此表 的读和写不能同时进行,但是可以多人并发的读取此表。像这样,当某个数据结构符合读/写或 生产者/消费者模型的时候就可以使用读写自旋锁。
| 函数 | 描述 |
|---|---|
| DEFINE_RWLOCK(rwlock_t lock) | 定义并初始化读写锁 |
| void rwlock_init(rwlock_t *lock) | 初始化读写锁。 |
| 读操作 | |
| void read_lock(rwlock_t *lock) | 获取读锁。 |
| void read_unlock(rwlock_t *lock) | 释放读锁。 |
| void read_lock_irq(rwlock_t *lock) | 禁止本地中断,并且获取读锁。 |
| void read_unlock_irq(rwlock_t *lock) | 打开本地中断,并且释放读锁。 |
| void read_lock_irqsave(rwlock_t *lock, unsigned long flags) | 保存中断状态,禁止本地中断,并获取读锁。 |
| void read_unlock_irqrestore(rwlock_t *lock,unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放读锁。 |
| void read_lock_bh(rwlock_t *lock) | 关闭下半部,并获取读锁。 |
| void read_unlock_bh(rwlock_t *lock) | 打开下半部,并释放读锁。 |
| 写操作 | |
| void write_lock(rwlock_t *lock) | 获取写锁。 |
| void write_unlock(rwlock_t *lock) | 释放写锁。 |
| void write_lock_irq(rwlock_t *lock) | 禁止本地中断,并且获取写锁。 |
| void write_unlock_irq(rwlock_t *lock) | 打开本地中断,并且释放写锁。 |
| void write_lock_irqsave(rwlock_t *lock,unsigned long flags) | 保存中断状态,禁止本地中断,并获取写锁 |
| void write_unlock_irqrestore(rwlock_t *lock,unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放读锁。 |
| void write_lock_bh(rwlock_t *lock) | 关闭下半部,并获取读锁。 |
| void write_unlock_bh(rwlock_t *lock) | 打开下半部,并释放读锁。 |
2.3.3 顺序锁#
顺序锁在读写锁的基础上衍生而来的,使用读写锁的时候读操作和写操作不能同时进行。使用顺序锁的话可以允许在写的时候进行读操作,也就是实现同时读写,但是不允许同时进行并发的写操作。
1 | typedef struct { |
| 函数 | 描述 |
|---|---|
| DEFINE_SEQLOCK(seqlock_t sl) | 定义并初始化顺序锁 |
| void seqlock_ini seqlock_t *sl) | 初始化顺序锁。 |
| void write_seqlock(seqlock_t *sl) | 获取写顺序锁。 |
| void write_sequnlock(seqlock_t *sl) | 释放写顺序锁。 |
| void write_seqlock_irq(seqlock_t *sl) | 禁止本地中断,并且获取写顺序锁 |
| void write_sequnlock_irq(seqlock_t *sl) | 打开本地中断,并且释放写顺序锁。 |
| void write_seqlock_irqsave(seqlock_t *sl,unsigned long flags) | 保存中断状态,禁止本地中断,并获取写顺序锁。 |
| void write_sequnlock_irqrestore(seqlock_t *sl,unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放写顺序锁。 |
| void write_seqlock_bh(seqlock_t *sl) | 关闭下半部,并获取写读锁。 |
| void write_sequnlock_bh(seqlock_t *sl) | 打开下半部,并释放写读锁。 |
| unsigned read_seqbegin(const seqlock_t *sl) | 读单元访问共享资源的时候调用此函数,此函数会返回顺序锁的顺序号。 |
| unsigned read_seqretry(const seqlock_t *sl,unsigned start) | 读结束以后调用此函数检查在读的过程中有没有对资源进行写操作,如果有的话就要重读 |
2.4 信号量#
相比于自旋锁,信号量可以使线程进入休眠状态,比如 A 与 B、C 合租了一套房子,这个 房子只有一个厕所,一次只能一个人使用。某一天早上 A 去上厕所了,过了一会 B 也想用厕 所,因为 A 在厕所里面,所以 B 只能等到 A 用来了才能进去。B 要么就一直在厕所门口等着, 等 A 出来,这个时候就相当于自旋锁。B 也可以告诉 A,让 A 出来以后通知他一下,然后 B 继 续回房间睡觉,这个时候相当于信号量。可以看出,使用信号量会提高处理器的使用效率,毕 竟不用一直傻乎乎的在那里“自旋”等待。但是,信号量的开销要比自旋锁大,因为信号量使 线程进入休眠状态以后会切换线程,切换线程就会有开销。
信号量的特点:
适用于那些占用资源比较久的场合,如线程同步。
因此信号量等待不能用于中断中,因为中断不能休眠。
2.4.1 信号量 API#
1 | struct semaphore { |
| 函数 | 描述 |
|---|---|
| DEFINE_SEAMPHORE(name) | 定义一个信号量,并且设置信号量的值为 1。 |
| void sema_init(struct semaphore *sem, int val) | 初始化信号量 sem,设置信号量值为 val。 |
| void down(struct semaphore *sem) | 获取信号量,因为会导致休眠,因此不能在中断中使用。 |
| int down_trylock(struct semaphore *sem); | 尝试获取信号量,如果能获取到信号量就获取,并且返回 0。如果不能就返回非 0,并且不会进入休眠。 |
| int down_interruptible(struct semaphore *sem) | 获取信号量,和 down 类似,只是使用 down 进入休眠状态的线程不能被信号打断。而使用此函数进入休眠以后是可以被信号打断的。 |
| void up(struct semaphore *sem) | 释放信号量 |
1 | struct semaphore sem; /* 定义信号量 */ |
2.5 互斥锁#
将信号量的值设置为 1 就可以使用信号量进行互斥访问了,虽然可以通过信号量实现互斥,但是 Linux 提供了一个比信号量更专业的机制来进行互斥,它就是互斥体—mutex。互斥访问表示一次只有一个线程可以访问共享资源,不能递归申请互斥锁。
1 | struct mutex { |
使用 mutex 的时候要注意如下几点:
1. mutex 可以导致休眠,因此不能在中断中使用 mutex,中断中只能使用自旋锁。
2. 和信号量一样,mutex 保护的临界区可以调用引起阻塞的 API 函数。
3. 因为一次只有一个线程可以持有 mutex,因此,必须由 mutex 的持有者释放 mutex。并且 mutex 不能递归上锁和解锁。
2.5.1 互斥锁API#
| 函数 | 描述 |
|---|---|
| DEFINE_MUTEX(name) | 定义并初始化一个 mutex 变量。 |
| void mutex_init(mutex *lock) | 初始化 mutex。 |
| void mutex_lock(struct mutex *lock) | 获取 mutex,也就是给 mutex 上锁。如果获取不到就进休眠。 |
| void mutex_unlock(struct mutex *lock) | 释放 mutex,也就给 mutex 解锁。 |
| int mutex_trylock(struct mutex *lock) | 尝试获取 mutex,如果成功就返回 1,如果失败就返回 0。 |
| int mutex_is_locked(struct mutex *lock) | 判断 mutex 是否被获取,如果是的话就返回1,否则返回 0。 |
| int mutex_lock_interruptible(struct mutex *lock) | 使用此函数获取信号量失败进入休眠以后可以被信号打断 |
1 | struct mutex lock; /* 定义一个互斥体 */ |
2.6 SMP 架构下percpu变量机制#
随着 SMP(对称多处理器架构) 的发展,程序确实是在并发执行,也为数据同步带来了更大的挑战。
在 SMP 架构中,每个 CPU 都拥有自己的高速缓存,通常,L1 cache 是 CPU 独占的,每个 CPU 都有一份,它的速度自然是最快的,而 L2 cache 通常是所有 CPU 共享的高速缓存,当 CPU 载入一个全局数据时,会逐级地查看高速缓存,如果没有在缓存中命中,就从内存中载入,并加入到各级 cache 中,当下次需要读取这个值时,直接读取 cache 。
假如进程在 CPU0 上操作一个共享变量,在某个时刻进程被调度到 CPU1 上执行时,CPU0 和 CPU1 上的 共享变量值就不同。
percpu机制:为了避免多个 CPU 对全局数据的竞争而导致的性能损失,percpu 直接为每个 CPU 生成一份独有的数据备份,每个数据备份占用独立的内存,CPU 不应该修改不属于自己的这部分数据,这样就避免了多 CPU 对全局数据的竞争问题。
2.6.0 percpu 变量的存储格式#
对于普通的变量而言,变量的加载地址就是程序中使用的该变量的地址,可以使用取址符获取变量地址。
percpu 变量:percpu 变量的加载地址是不允许访问的,取而代之的是对于 n 核的 SMP 架构系统,内核将会为每一个 CPU 另行开辟一片内存,将该 percpu 变量复制 n 份分别放在每个 CPU 独有的内存区中。
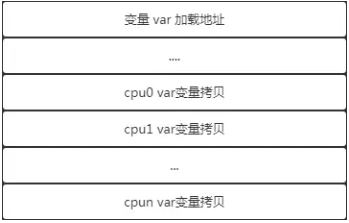
也就是说,为 percpu 分配内存的时候,原始的变量 var 与 percpu 变量内存偏移值 offset 被保存了下来,每个 CPU 对应的 percpu 变量地址为 (&var + offset),当然真实情况要比这个复杂,将在后文中讲解。
2.6.1 percpu变量使用场景#
- 计数器和统计信息:如果你有计数器或者统计信息需要在每个CPU上独立维护,那么
percpu变量将会非常有用。 - 异步任务处理:通过
percpu变量来维护异步任务的上下文信息。
2.6.2 percpu 变量的定义#
1 | DEFINE_PER_CPU(type, name);//静态定义一个 percpu变量,type 是变量类型,name 是变量名 |
2.6.3 percpu 变量的读写#
静态定义的读写:
1 | DEFINE_PER_CPU(int, val)=0; |
为什么在调用 get_cpu_var 时,第一步是禁止内核抢占呢?
想想这样一个场景,进程 A 在 CPU0 上执行,读取了 percpu 变量到寄存器中,这时候进程被高优先级进程抢占,继续执行的时候可能被转移到 CPU1 上执行,这时候在 CPU1 执行的代码操作的仍旧是 CPU0 上的 percpu 变量,这显然是错误的。
动态定义的读写:
1 | int *pint = alloc_percpu(int); |
raw_smp_processor_id() 函数返回当前 CPU num,这个示例也就是操作当前 CPU 的 percpu 变量,这个接口并不需要禁止内核抢占,因为不管进程被切换到哪个 CPU 上执行,它所操作的都是第二个参数提供的 CPU。
2.6.4 percpu 变量实现原理#
1 |
展开:
1 |
- 在 SMP 架构下,被定义的 percpu 变量在编译后放在
.data..percpu这个 section 中; - 在单核系统中, percpu 变量被放在
.data也就是数据段中;
2.6.4.1 get_cpu_var实现#
1 |
首先,preempt_disable 禁用内核抢占,然后使用 this_cpu_ptr 接口获取当前 cpu 上对应的 var 变量地址。
对get_cpu_var展开:可以看到就能准确获取当前cpu的val地址。
1 |
使用完变量之后记得调用 put_cpu_var 以使能内核抢占功能,恢复系统状态。
3 linux内核下不同同步机制的适用场景#
- 原子操作:主要用于进行原子性的读写操作,适用于计数器等场景。
- 自旋锁:用于短时间内锁定互斥资源,适用于锁持有时间短的场景。
- 读写锁:用于提供读模式和写模式下的锁操作,适用于读多写少的场景。
- MUTEX:类似自旋锁,但是可以导致调用线程睡眠,适用于锁持有时间较长的场景。(允许休眠)
- 信号量:用于实现互斥和同步,适用于保护临界区和控制访问频率。但是可以导致调用线程睡眠,适用于锁持有时间较长的场景。(允许休眠)